
|
MINISTÉRIO DA DEFESA |

|
PORTARIA N º 074-DEC, DE 17 DE OUTUBRO DE 2018
O CHEFE DO DEPARTAMENTO DE ENGENHARIA E CONSTRUÇÃO, no uso das atribuições constantes nos incisos I e III, do art. 3º do Regulamento do Departamento de Engenharia e Construção (R-155), aprovado pela Portaria nº 891, do Comandante do Exército, de 28 de novembro de 2006; e em conformidade com o parágrafo único do art. 5º, o inciso II do art. 12 e o caput do art. 44, das Instruções Gerais para as Publicações Padronizadas do Exército (EB10-IG-01.002), aprovadas pela Portaria do Comandante do Exército nº 770, de 7 de dezembro de 2011, resolve:
Art. 1º Aprovar o Caderno de Instrução sobre o Emprego de Aeronaves de Asa Rotativa no Georreferenciamento de Áreas Patrimoniais Jurisdicionadas ao Exército Brasileiro (EB50-CI-04.004).
Art. 2º Estabelecer que este Caderno de Instrução entre em vigor na data de sua publicação.
ÍNDICE DE ASSUNTOS
| CAPÍTULO I - INTRODUÇÃO | 1.1 Procedimentos gerais | |
| 1.2 A Eevolução da fotogrametria no Brasil e o advento da aeronave de asa rotativa | ||
| 1.3 A Eevolução dos equipamentos topográficos | ||
| CAPÍTULO II - GEORREFERENCIAMENTO COM EMPREGO DE AERONAVE DE ASA ROTATIVA | ||
| 2.1 Requisitos básicos | ||
| 2.2 Materiais a serem empregados | ||
| 2.3 Procedimentos operacionais | ||
| 2.4 Processamento das imagens obtidas | ||
| CAPÍTULO III- AVALIAÇÃO DA QUALIDADE DO PROCESSAMENTO | ||
| 3.1 Avaliação do padrão de exatidão cartográfica | ||
| 3.2 Considerações acerca da diferença entre as coordenadas de campo e as de imagem | ||
| CAPÍTULO IV - CONSIDERAÇÕES FINAIS | ||
| 4.1 Conclusão | ||
| GLOSSÁRIO | ||
| Parte I - Abreviaturas e Siglas | ||
| Parte II - Termos e Definições | ||
| REFERÊNCIAS |
CAPÍTULO I
DAS DISPOSIÇÕES PRELIMINARES
1.1 PROCEDIMENTOS GERAIS
1.1.1 Este Caderno de Instrução tem por objetivo orientar o uso de Sistema de Aeronaves Remotamente Pilotadas (SARP) para o georreferenciamento de áreas patrimoniais jurisdicionadas ao Exército Brasileiro. Essa tecnologia permite a aquisição de dados da superfície terrestre com grande resolução e precisão, capaze de atender diversas aplicações (monitoramento ambiental, vistoria de imóveis, fiscalização cadastral, projetos de engenharia, etc.), proporcionando otimização do tempo de trabalho de campo e ampliação da capacidade de coleta de dados.
1.1.2 Além do citado, o emprego de SARP permite realizar levantamentos topográficos e cartográficos; realizar o controle do uso e ocupação dos imóveis à medida que permite o apoio à execução de uma patrulha patrimonial de forma rápida e eficiente, bem como atualização do Plano Diretor das Organizações Militares (PDOM).
1.1.3 O georreferenciamento de áreas patrimoniais jurisdicionadas ao Exército Brasileiro consistem na transcrição dos imóveis considerados em suas características básicas, isto é, limites e confrontações, através da realização do levantamento das coordenadas dos vértices definidores dos limites ao Sistema Geodésico Brasileiro, com precisão posicional.
1.1.4 O planejamento da referida atividade deve considerar o preparo para a execução das atividades de campo como uma das etapas mais importantes, em que serão levantadas: informações cadastrais e dominiais do imóvel; materiais e equipamentos necessários; e acesso aos limites do imóvel.
1.1.5 Para o levantamento em campo são utilizadas técnicas de topografia (emprego de receptores GNSS e Estação Total), bem como técnicas de aerofotogrametria e sensoriamento remoto. No tocante à aerofotogrametria, destaca-se a evolução das técnicas e tecnologias associadas, culminando no emprego de RPA (aeronaves remotamente pilotadas) para a geração de produtos topográficos, com destaque às aeronaves de asa rotativa, popularmente denominadas RPAs.
1.1.6 Assim, este Caderno de Instrução apresenta procedimentos para o emprego de RPA no georreferenciamento de áreas patrimoniais, contemplando as etapas do processo:
a) planejamento da atividade; cadastramento da aeronave, dos operadores e do plano de voo;
b) execução do plano de vôo;
c) processamento das imagens geradas; e
d) avaliação dos dados obtidos.
1.2 EVOLUÇÃO DA FOTOGRAMETRIA NO BRASIL E O ADVENTO DA RPA
1.2.1 Fotogrametria corresponde à arte, ciência e tecnologia de obter informações confiáveis dos objetos e do meio ambiente por meio de emprego de processos de registro, medições e interpretações de imagens fotográficas (que podem ser aéreas ou terrestres).
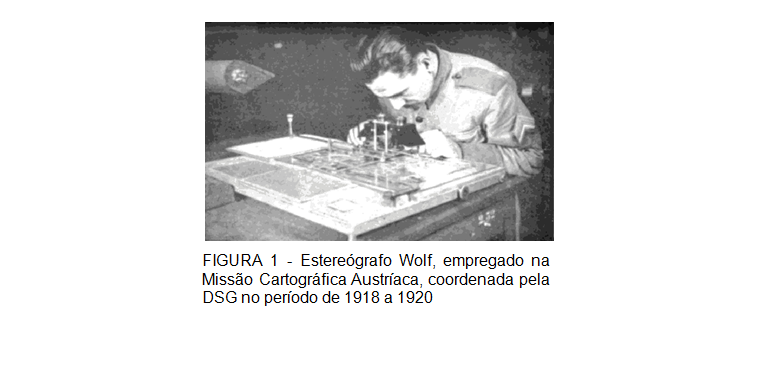
1.2.3 No Brasil, o desenvolvimento da fotogrametria iniciou-se na década de 1910 por iniciativa do órgão oficial de mapeamento DSG (Diretoria de Serviço Geográfico). Como marco inicial, destaca-se o trabalho do então Major Alfredo Vidal, em 1912, que, com o apoio do então prefeito da cidade do Rio de Janeiro (General Bento Ribeiro), instituiu a seção de Estereofotogrametria na Fortaleza da Conceição, atual 5º CGeo (5º Centro de Geoinformação).
1.2.4 A contar daquela época, vários trabalhos marcaram a evolução da fotogrametria no território nacional, podendo ser considerados como marcos do desenvolvimento tecnológico associado à atividade. As Figuras 1, 2, 3, 4 e 5 ilustram os equipamentos empregados em alguns desses trabalhos, a fim de exemplificar a evolução da tecnologia entre as décadas de 1910 e 1970.

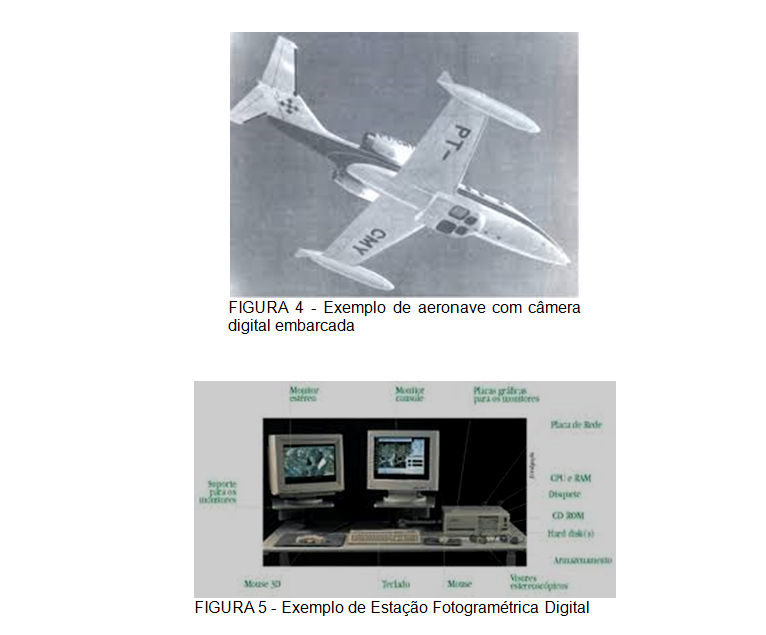
1.2.5 A contar da década de 1980, a Fotogrametria evoluiu significativamente com os avanços das tecnologias nas áreas da engenharia elétrica e de ciências da computação, contribuindo para a mudança da plataforma analógica para digital. Nesse contexto, os equipamentos óticos-mecânicos foram substituídos pelas estações digitais e as aeronaves passaram a ser equipadas com câmeras digitais, conforme ilustrados nos exemplos a seguir:
1.2.6 Nos anos 90 e 2000, a Fotogrametria Digital manteve seu desenvolvimento contínuo e passo a passo com a incorporação de funcionalidades de visualização, robótica, animação, etc. Sob esse aspecto, foi possível realizar a integração com dados obtidos de outras plataformas, tais como: imagens de satélite, radar de abertura sintética (SAR), etc., além da criação de novas ferramentas de processamento, que possibilitou o desenvolvimento de novos produtos (a exemplo do Modelo Digital de Elevação - MDE).
1.2.7 A integração de diferentes áreas de conhecimento, associadas ao desenvolvimento da inteligência artificial, proporcionou o surgimento das primeiras aeronaves remotamente pilotadas (RPA). Nesse sentido, destaca-se a rápida evolução das aplicações das aeronaves (antes empregadas basicamente para fins recreativos - os aeromodelos) para o emprego não recreativo, incluindo a fotogrametria.
1.2.8 Sob esse enfoque, o desenvolvimento de aplicações da RPA na fotogrametria permitiu uma nova alternativa da aquisição de dados do terreno em apoio à Engenharia e ao mapeamento (incluindo o georreferenciamento).
1.2.9 Para atingir esse novo objetivo, a aeronave passou a atuar em conjunto com hardware e software para o processamento das imagens digitais e geração de ortomosaicos. Nesse contexto, a nova tecnologia passou a ser denominada SARP (Sistema de Aeronaves Remotamente Pilotadas).
1.3 A EVOLUÇÃO DOS EQUIPAMENTOS TOPOGRÁFICOS
1.3.1 Ao ler os catálogos de instrumentos topográficos, pode-se observar as maravilhas que a tecnologia nos oferece a cada dia, não podendo deixar de sentir admiração pelos topógrafos que através dos séculos realizaram levantamentos e medidas, com instrumentos rudimentares, chegando a resultados fantásticos.
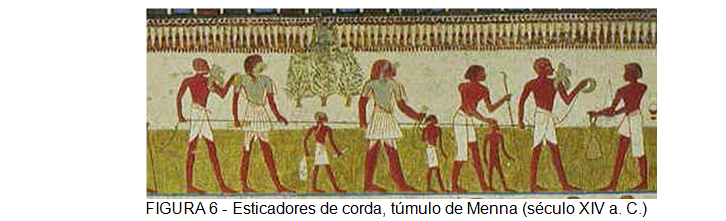
1.3.2 Retrocedendo-se ao ano de 3.000 a.C., vemos que os babilônios e os egípcios utilizavam a corda para a medida de distâncias. Estes eram chamados de esticadores de cordas.
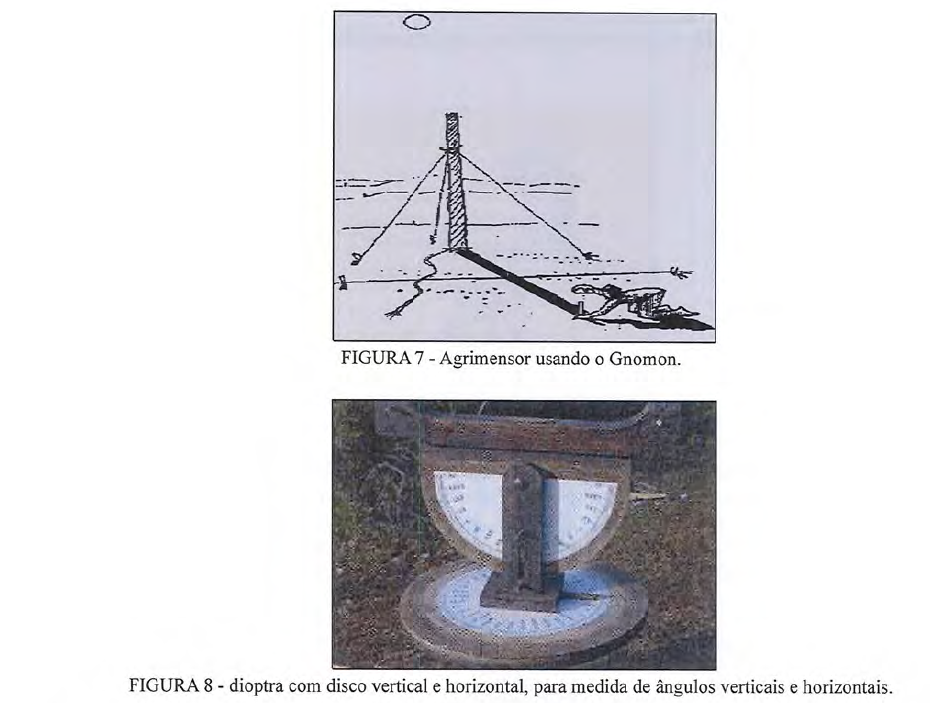
1.3.3 Por volta do ano de 560 a.C., não se tem referência à existência e construção de nova instrumentação até que Anaximandro de Mileto introduzisse o "Gnomon". Acredita-se que ele se baseou em alguma referência dos babilônios ou egípcios. Entre os primeiros usuários desse novo instrumento encontramos Metón, que determinou a direção do Norte e Erastóstenes que calculou a circunferência da Terra.
1.3.4 A "dioptra" ou plano horizontal, que servia para a medida de ângulos e do nivelamento, tinham seu princípio em um tubo em forma de "U" com água, e que servia para nivelar uma plataforma, podendo ainda medir os ângulos horizontais e verticais.
1.3.5 A bússola que, desde a sua invenção pelos chineses até a referência em 1187 por Alexander Neckman, com as melhorias introduzidas por Leonardo Da Vinci e Schmalcalder , chegou a ser a precursora do teodolito.
1.3.6 Em 1720, foi construído o primeiro teodolito que era provido de quatro parafusos niveladores, cuja autoria é de Jonathan Sisson.
1.3.7 Em 1900, Fennel criou, de acordo com Porro, a primeira ocular analítica, usando um arco circular como linha de base dos fios do retículo. Em 1936, apareceu o DKR e, em 1946 o DKRM da Kern. (Possivelmente foi Kern, com o KRlA, o último que fabricou um autoredutor mecânico e não eletromagnético, tendo este os fios retos e paralelos, que em função da inclinação da ocular, por meio de saídas e rodas denteadas, variava na imagem do retículo observado desde a ocular, a distância entre os fios).

1.3.8 Em 1886, Sanguet inventou o principio que daria lugar ao prisma taqueométrico. Este princípio foi fabricado pela Wild, no ano 1921, com mira vertical, no que posteriormente seria o duplicador taqueométrico (princípio idealizado por Boskovic em 1777). Tivemos que esperar até 1933 para encontrar este sistema empregado na conhecida mira, horizontal, fabricada por Breithaupt.
1.3.9 Em 1908, Heinrich Wild, colaborador da Carl Zeiss, introduziu a luneta de foco interno. Assim mesmo a Wild, devemos o nível de coincidência, o micrômetro de coincidência e a estadia Invar como hoje a conhecemos. Os limbos de cristal foram fabricados em série pouco antes de 1936, melhorando assim a graduação no próprio limbo. No ano de1936, Smakula vaporizou as lentes da luneta no vazio, obtendo algo parecido com o que atualmente conhecemos como a Óptica azul da luneta.

1.3.10 O primeiro distanciômetro eletro-óptico se fabricou na Rússia em 1936, promovido pelo Instituto de Óptica Governamental. Este tipo de instrumento se empregou no distanciômetro Aga fabricado em Estocolmo, em 1948.
1.3.11 Em 1957, Wadley obteve um distanciômetro de microondas, o Telurometro. A Wild fabrica o DI-10, distanciômetro de pequenas dimensões, que unido a um teodolito proporcionava um grande benefício para as medidas topográficas, tanto em rapidez como em precisão
1.3.12 A contar destas datas, o avanço tem sido menos vertiginoso, passando rapidamente aos distanciômetros montados em excêntrica aos montados sobre a própria luneta ou bem sobre uma ponte na mesma carcaça do aparelho.
1.3.13 Há uns 25 anos apareceram as semiestações, que eram distanciômetro montado sobre o mesmo teodolito, porém como o teodolito era analógico, a eletrônica só podia acontecer os resultados da medida da distância, devendo digitar a mão os ângulos para que o aparelho pudesse realizar os cálculos desejados.
1.3.14 Com o aparecimento dos sistemas eletrônicos de captação de ângulos, a corrida contra o tempo tem sido mais rápida e efetiva, obtendo-se teodolitos digitais mais precisos.
1.3.15 Da captação eletrônica de ângulos, tanto em sua versão incremental como absoluta, passamos quase sem nos darmos conta da concepção da atual estação total, melhorando a leitura angular, assim como a medida da distância. Também a eletrônica permite sistemas compensadores de um, dois ou três eixos para a verticalidade do instrumento.
1.3.16 O seguinte passo que melhora a captação de dados são os coletores de dados, aparecendo paulatinamente os coletores externos (manuais com software próprio que desenvolvem o funcionamento da estação), coletores de cartão de registro (os quais são manejados pela estação e seu software interno).
1.3.17 Atualmente, a tecnologia permite a transmissão de dados por meio de um modem, linha telefônica ou satélite, estando o coletor a centenas de quilômetros do ordenador que recebe os dados. Não vamos entrar aqui a comentar as possibilidades do sistema GPS com seu estacionamento em tempo real ou diferido, com altas precisões que se estão obtendo.

CAPÍTULO II
GEORREFERENCIAMENTO COM EMPREGO DE AERONAVE DE ASA ROTATIVA
2.1 REQUISITOS BÁSICOS
2.1.1 GEORREFERENCIAMENTO COM PRECISÃO DE NAVEGAÇÃO
2.1.1.1 Aplica-se em casos onde a precisão posicional métrica é compatível com os objetivos da missão, a exemplo das patrulhas patrimoniais e PDOM.
2.1.1.2 Necessita de operadores cadastrados no SISANT (Sistema de Aeronaves Não Tripuladas), com conhecimento da legislação pertinente e habilidades no uso do equipamento.
2.1.2 GEORREFERENCIAMENTO COM PRECISÃO TOPOGRÁFICA
2.1.2.1 Aplica-se em casos onde a precisão posicional necessária ao cumprimento dos objetivos da missão deverá ser submétrica, a exemplo de levantamento de áreas patrimoniais e projetos de engenharia.
2.1.2.2 Necessita de profissional especializado, com conhecimentos de topografia (ou agrimensura) e fotogrametria, além de habilitação junto ao CREA (Conselho Regional de Engenharia e Agronomia), em uma das seguintes atribuições: técnico em agrimensura, topógrafo, engenheiro agrimensor, agrimensor ou engenheiro cartógrafo.
2.1.2.3 Em todos os casos, é obrigatório o conhecimento das legislações e orientações pertinentes às operações de aerolevantamento para a realização de voos seguros e dentro das normas disponibilizadas pelo Departamento de Controle do Espaço Aéreo (DECEA) no site https://www.decea.gov.br/RPA/.
2.2 MATERIAIS A SEREM EMPREGADOS
2.2.1 Para executar georreferenciamento de uma área patrimonial com aeronaves remotamente pilotadas, serão necessários os seguintes materiais e requisitos mínimos exigidos pelo software empregado:
a) RPA (A título de exemplo, será utilizado o Phantom 4 DJI);

b) DISPOSITIVO MÓVEL: TABLET OU SMARTPHONE - com sistema operacional Android (versão 5.0 ou superior) ou IOS (versão 11.3.1 ou superior) com acesso à internet; e
c) HARDWARE - computador com sistema operacional Windows XP ou versão posterior (64 bits), Mac OS X Snow Leopard ou versão posterior, ou Debian / Ubuntu (64 bits), com Processador com 2.0 Ghz (ou superior), com 12 GB de memória RAM (ou superior) e placa de vídeo dedicada (off-board) de 8 GB (ou superior) utilizada para renderização de projetos 3D.
d) RECEPTOR GNSS E/OU ESTAÇÃO TOTAL equipamentos topográficos empregados no levantamento dos pontos de controle (e de checagem) necessários ao refinamento da acurácia dos ortomosaicos.
2.3 PROCEDIMENTOS OPERACIONAIS
2.3.1 CADASTRAMENTO DO RPA NA ANAC
2.3.1.1 O cadastramento no SISANT é obrigatório para todas as aeronaves não tripuladas de uso recreativo (aeromodelo) ou não recreativo (RPA), com peso de decolagem superior a 250 g e inferior a 25 kg, e que não voará além da Linha de Visada Visual (BVLOS) ou acima de 400 pés (120 metros) em relação ao nível do solo.
2.3.1.2 Cada aeronave cadastrada deve estar vinculada a uma pessoa ou empresa, criando assim uma responsabilização legal para o seu emprego.
2.3.1.3 Para cadastrar é necessário informar:
a) dados pessoais (nome, endereço, CPF, e-mail);
b) dados de pessoa jurídica (CNPJ) se for o caso;
c) Dados da aeronave (nome, modelo, fabricante, número de série e foto que identifique o equipamento);
d) uma combinação de nove dígitos a ser criada pelo operador do RPA para cadastrado no SISANT e que será a identificação do equipamento, devendo ser afixada em local visível na aeronave; e
e) incluir uma foto da aeronave com alguma característica ou marca produzida pelo fabricante (número de série do equipamento ou qualquer outro sinal que possa diferenciar a aeronave).
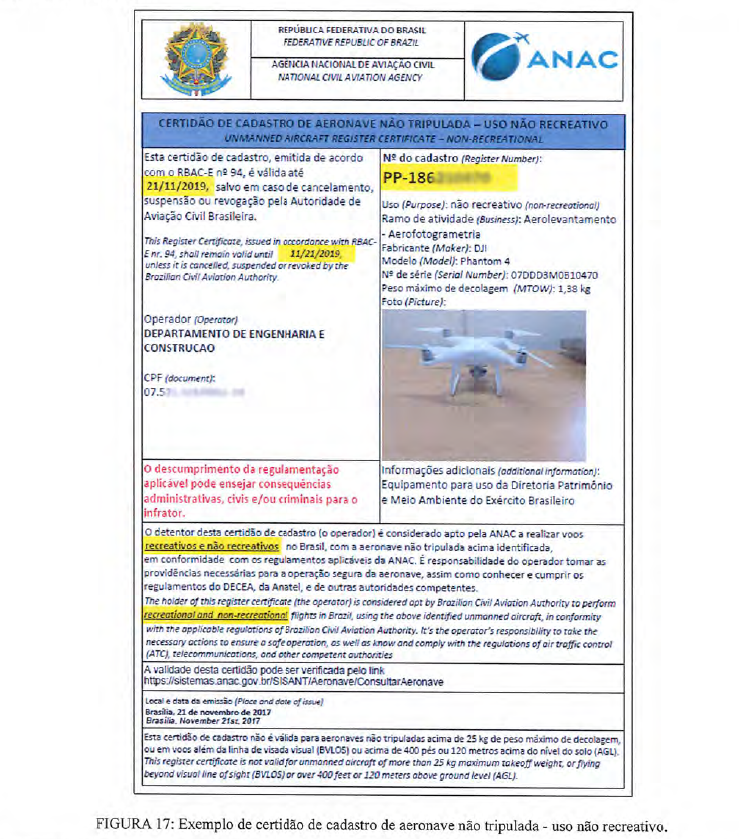
2.3.1.4 Após o cadastro será gerada uma certidão de cadastro de aeronave não tripulada uso não recreativo (documento de porte obrigatório em todas as operações), conforme ilustrado na figura a seguir. O link de acesso para o cadastramento: https://sistemas.anac.gov.br/sisant.
2.3.2 CADASTRAMENTO DO OPERADOR E DO PLANO DE VOO NO DECEA
2.3.2.1 O objetivo da realização destes registros é possibilitar a entrada do RPA no espaço aéreo de forma coordenada e segura. É preciso saber que trafegam pelos céus do Brasil aeronaves de companhias aéreas, a chamada aviação regular, aviões de médio e pequeno porte da aviação geral, helicópteros, e, em lugares previamente autorizados e estabelecidos, asa-delta, parapentes e afins.
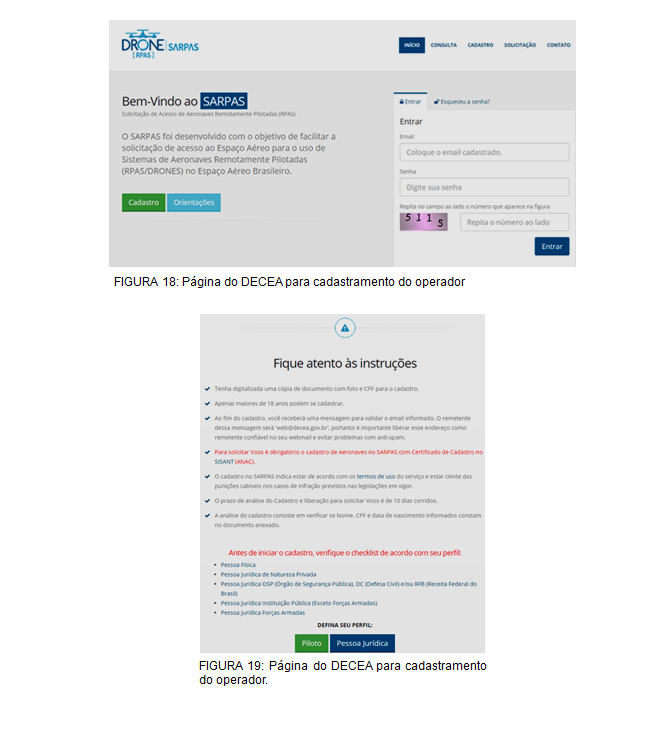
2.3.2.2 O primeiro passo é o cadastro SARPAS através do site http://servicos2.decea.gov.br/sarpas, para o cadastro do operador. Serão solicitadas informações básicas como: nome completo, e-mail, telefone, CPF e data de nascimento. (FIGURAS 18 e 19).

2.3.2.3 Após o cadastramento do operador, o proximo passo consiste no cadastrameno da areonave. Para isto, a aeronave deverá possuir cadastro prévio no sistema da ANAC. Na tela de cadastro de aeronaves, o operador poderá indicar um nome para o seu registro, informando o peso e numero de resistro no SISANT ( FIGURA 21).Para a liberação mais rápida do cadastro, utilize no envio do arquivo do certificado de cadastro, o própio arquivo (pdf) gerado pelo SISANT.

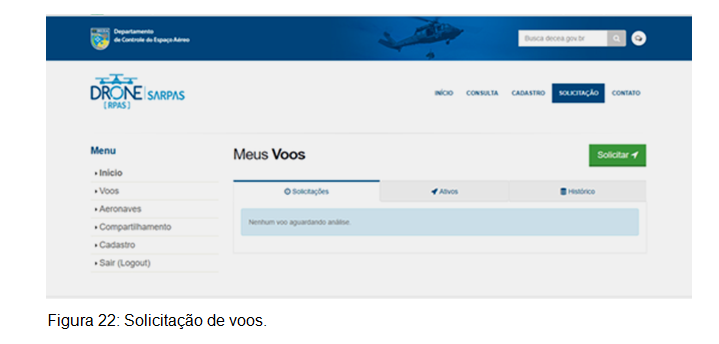
2.3.2.4 Uma vez realizado o registro do operador e a aeronave estando com status ativo, o operador poderá realizar as solicitações de voos.FIGURA22.
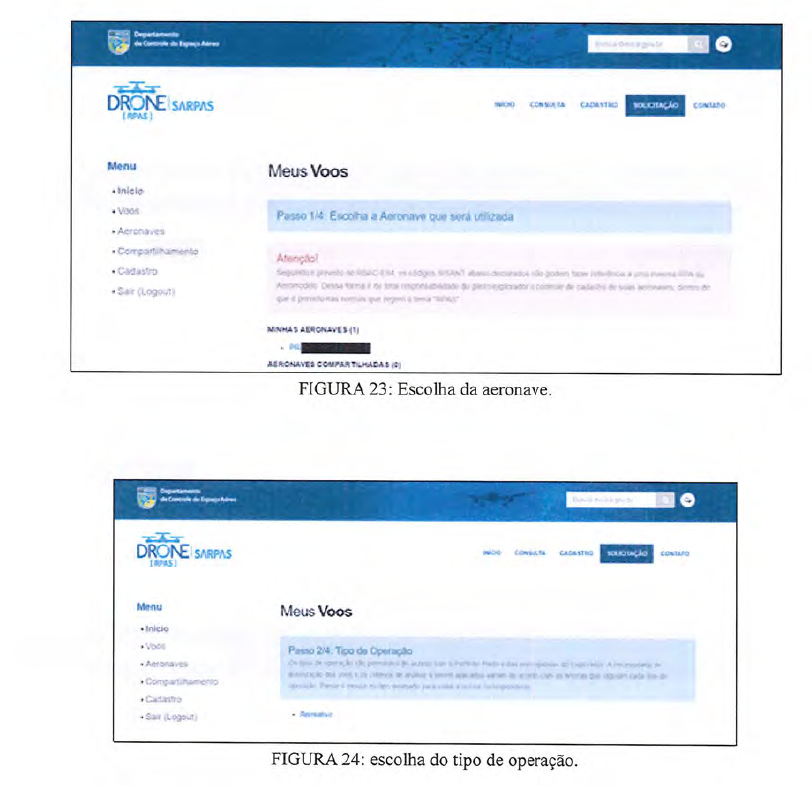
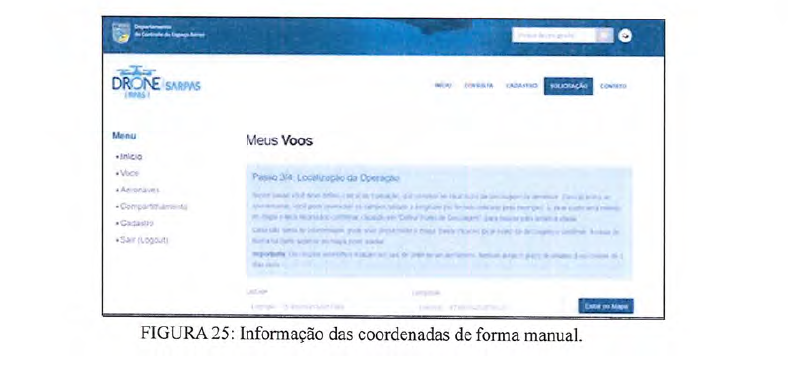
2.3.2.5 Cabe agora ao operador selecionar a aeronave cadastrada através do código referente ao certificado gerado no SISANT, e e em seguida selecionar a modalidade de voo.(FIGURAS 23 E 24).
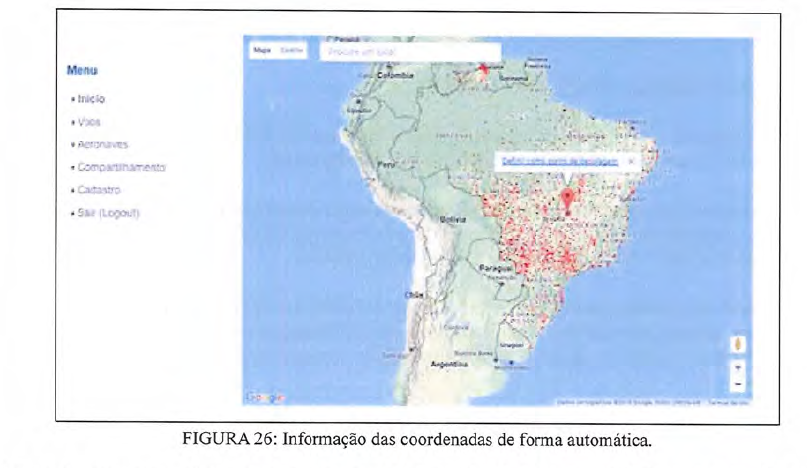
2.3.2.6 O operador poderá indicar a localização didgitando a longitude e latitude (FIGURA 25) ou buscando a localização no mapa, que é preenchida automaticamente, as referências geográficas.(FIGURA 26)
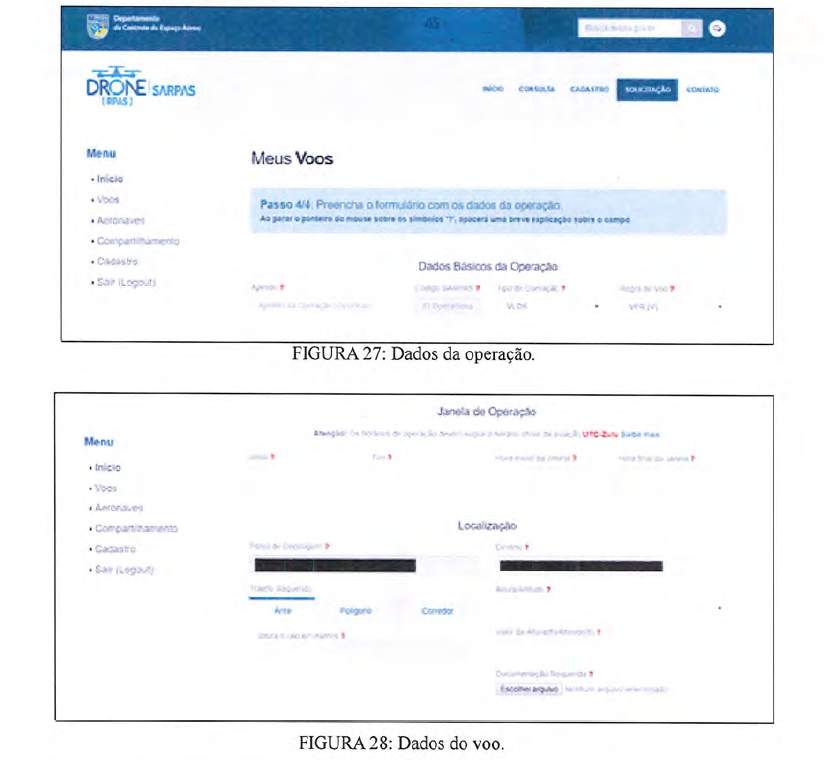
2.3.2.7 Após esta etapa, deve-se registrar os dados de localização e perfil da operação de voo, com informações do tipo de operação, regra de voo, data e hora início e fim da operação, ponto de decolagem e de aterrissagem, altitude, dentre outros. (Figuras 27 e 28)
2.3.2.8 Uma vez realizado o registro, basta aguardar pela liberação do voo.
2.3.3 PLANEJAMENTO DO PLANO DE VOO
2.3.3.1 O plano de voo deverá ser traçado antes do emprego da RPA, levando em consideração a área que será medida e a aeronave utilizada, obedecendo-se as normativas.
2.3.3.2 Existem diversos aplicativos de voo automatizado disponíveis no mercado, alguns gratuitos e outros pagos, compatíveis com Android e/ou IOS, por exemplo PIX4D CAPTURE, DRONE DEPLOY, DJI GROUND STATION PRO, SKYRPAS e PRECISION FLIGHT.
2.3.3.3 Neste documento será utilizado o software DRONE DEPLOY, que é um aplicativo gratuito e compatível com sistema operacional Android e IOS, possui integração com plataforma de aplicativos para Smartphone/Tablet e permite fazer o planejamento de voo on-line por meio da rede mundial de computadores.
2.3.3.4 Cadastro na empresa gestora do RPA Deploy
2.3.3.4.1 Antes de confeccionar o plano de voo no software DRONE DEPLOY é necessário entrar no sítio web da empresa e criar um cadastro, acessando o endereço https://www.RPAdeploy.com/.

2.3.3.4.2 Clique em SignUp para efetuar o cadastro, logo em seguida abrirá uma nova aba onde o operador deverá preencher os seus dados pessoais. Ao finalizar o lançamento das informações clique em CREATE MY ACCOUNT (seta indicativa vermelha na FIGURA 30).

2.3.3.4.3 Finalizado este processo, o site enviará um e-mail de confirmação de cadastro, onde será necessário acessar novamente o site do software e clicar em Log In para ter acesso ao sítio web, lançando usuário e senha para ter acesso à sua conta. Caso já possua cadastro, desconsiderar os passos anteriores, clicar em Log In, e entrar com usuário e senha do cadastro para ter acesso à sua conta.
2.3.3.4.4 Após realizados esses passos é necessário fazer o download do aplicativo DRONE DEPLOY no dispositivo móvel que será utilizado para operar o RPA. Para isso, deve-se baixar o aplicativo na Google Play Store (Android) ou App Store (IOS) e instalar o aplicativo. Acesse sua conta com usuário e senha cadastrados.
2.3.4 CONFECÇÃO DO PLANO DE VOO
2.3.4.1 O operador do SARP deverá executar o Log In, sendo redirecionado para uma nova aba, onde irá clicar em Plan Add a flight para traçar o seu plano de voo, conforme a FIGURA 31.
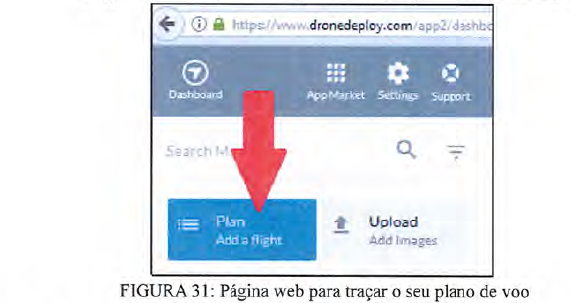
2.3.4.2 Após clicar em Plan Add a flight será aberta uma tela que mostrará a localização do computador que está acessando o software. Utilize o mouse para arrastar o mapa apresentado ao local em que deseja executar o voo.
2.3.4.3 Segue exemplificada uma parcela do imóvel DF 11-0005, utilizada como estudo de caso para o georreferenciamento com RPA e a execução de um voo. O operador da RPA deverá utilizar o mouse para ajustar o polígono da área a ser levantada, conforme FIGURA 32.

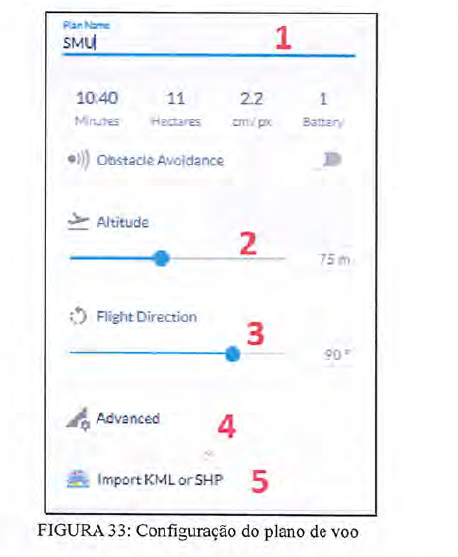
2.3.4.4 A mesma tela o operador do RPA deverá configurar o plano de voo, seguindo os passos abaixo:
a) Preencher um nome para o plano de voo (passo 1 da FIGURA 33);
b) Ajustar a altura do voo - será medida a partir do ponto inicial de decolagem do RPA, sendo que essa configuração irá influenciar diretamente no tempo de voo e na resolução das imagens (centímetro/pixel) a serem trabalhadas (passo 2 da FIGURA 33);
c) Indicar a direção do voo (passo 1 da FIGURA 33); e
d) em seguida, acessar as configurações avançadas e executar a importação de KML ou Shape (extensão de arquivo de outros softwares com os polígonos prontos, recebidos de programas como o Google Earth), confirmando assim a área a ser levantada durante o voo (passos 4 e 5 da FIGURA 33).
2.3.4.5 A configuração default no item Advanced é uma pré-configuração disponível no DRONE DEPLOY e que dispensa os passos de confecção do plano de voo anteriores, servindo como uma ferramenta ao operador do RPA caso haja necessidade.
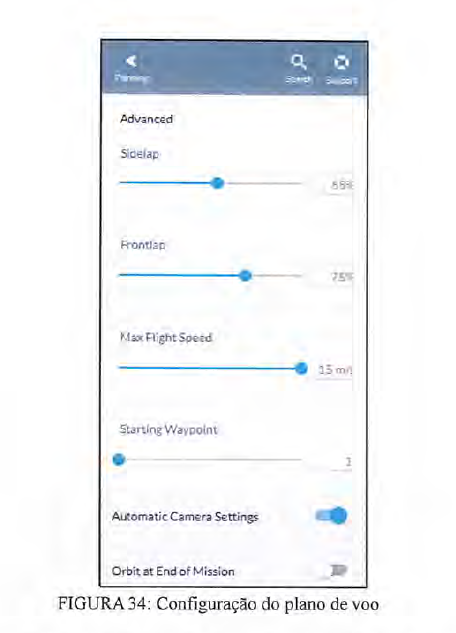
2.3.4.6 A FIGURA 34 apresenta uma aba com algumas opções de seleção para o plano de voo do RPA, onde o operador da RPA deverá selecionar um Sidelap de no mínimo 65% e um Frontlap de 75%, possibilitando assim uma superposição das imagens coletadas durante a execução do voo, que facilitarão o trabalho em escritório de processamento de imagens (produto final do georreferenciamento). A opção Orbit at End of Mission, quando selecionada, serve como ferramenta para o operador da aeronave realizar fotogrametrias em dimensão 3D de um objeto isolado e construído no terreno, servindo para controle e avaliação patrimonial.
2.3.4.7 O item Sidelap significa a realização de recobrimento lateral de cada foto coletada durante o plano de voo da RPA. O item Frontlap é a execução do recobrimento frontal de cada foto coletada pela RPA durante o voo. A opção Max Flight Speed permitirá estabelecer a velocidade máxima de voo a ser desenvolvida pela aeronave. O operador de RPA poderá ainda determinar o seu ponto de partida por meio do Starting Waypoint. A seleção da opção Automatic Camera Settings serve para automatizar a captura de fotos da câmera do RPA. O Orbit at End of Mission permite que o RPA capture fotos oblíquas, possibilitando gerar imagens em 3D e alterando automaticamente o ângulo da câmera da aeronave. Esta opção é restrita para trabalhos com objetos isolados e não pode ser empregada para levantamentos de áreas.
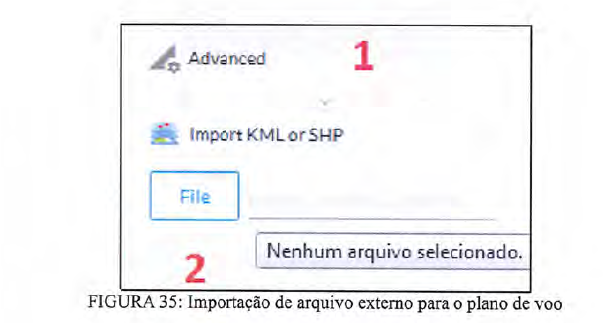
2.3.4.8 A opção Import Kml or SHP serve para fazer o enquadramento da área de voo, nos softwares com a extensão correspondente (QGIS, ArcGIS, Google Earth, entre outras), sem fazer a seleção do polígono apresentado na FIGURA 35. Para carregar o arquivo pré-determinado é só clicar em Import Kml or SHP. O usuário terá a opção de buscar esse arquivo no computador clicando em File, devendo assim selecioná-lo e em seguida carregá-lo no software DRONE DEPLOY.
2.3.4.9 Após finalizar todos os passos do plano de voo o usuário deverá salvá-lo na sua conta no DRONE DEPLOY e posteriormente deverá acessar as informações para começar a execução do voo com a aeronave.
2.3.5 EXECUÇÃO DO PLANO DE VOO
2.3.5.1 Para a execução do plano de voo empregando RPA, o operador deve observar a Resolução Nr 419, de 2 de maio de 2017, da Agência Nacional de Aviação Civil (ANAC), a qual aborda os requisitos gerais para aeronaves não tripuladas de uso civil.
2.3.5.2 O operador deverá conduzir a RPA, o controle remoto e o Smartphone/Tablet para a área a ser georreferenciada. A aeronave deverá ser montada, retirada a braçadeira para gimbal e o Smartphone/Tablet deverá ser encaixado no suporte para dispositivo móvel da RPA. Em seguida deverá ligar um terminal do cabo USB no dispositivo móvel e o outro na entrada USB localizada na parte de trás do controle remoto da RPA. Após a montagem da aeronave, o operador deverá ligar o controle remoto pressionando por 2 segundos o botão Power. Na seqüência, o operador do irá escutar um beep ao ligar o controle remoto, o LED que se encontra abaixo do botão Power do controle remoto irá piscar na cor verde, indicando que o rádio está se conectando com a aeronave. O LED isolado que se localiza abaixo do botão Power ficará verde quando a conexão estiver completa e os outros quatro LEDs na cor branca indicarão o nível de carga da bateria do controle remoto.

2.3.5.3 Para ligar o controlador da RPA, aperte o botão Power uma vez e solte, em seguida aperte novamente o botão Power e segure por 2 segundos. O LED do botão Power ficará verde e os indicadores de nível de carga da bateria exibirão a carga restante, verificando assim o nível de carga da bateria antes do início da operação.

2.3.5.4 Depois de ligar o controle remoto e a RPA, o operador deverá abrir no Smartphone/Tablet o aplicativo DRONE DEPLOY, finalizando assim o processo de sincronização da aeronave com o seu controle remoto. Em seguida, o operador deverá selecionar o plano de voo (FIGURA 39) que foi previamente confeccionado e que está registrado na sua conta do software que está sendo operado. Após a seleção do plano de voo o operador da aeronave será redirecionado para a área do voo programado.
2.3.5.5 Após a abertura da nova página, o operador da RPA deverá clicar no símbolo azul localizado no canto inferior direito da tela do Smartphone/Tablet, para que o software faça a verificação automática de todos os acessórios (cartão de memória, GPS e câmera) da aeronave para habilitar assim o RPA para a execução do plano de voo.
2.3.5.6 O software fará então a checagem automática, verificando se a RPA está em perfeito funcionamento ou se possui algum impedimento para a execução do plano de voo (FIGURA 41).

2.3.5.7 Após a verificação automática do funcionamento da RPA, a página do software RPA DEPLOY indicará a falha de algum acessório da aeronave. Caso a RPA esteja em perfeito funcionamento, apresentará um botão azul com o desenho de uma seta (indicação da seta vermelha na FIGURA 41).da página do aplicativo quando então terá início a execução do voo.
2.3.5.8 A RPA só levantará voo se passar pela checagem anterior. Um dos problemas mais comuns é a desatualização do firmware. Este deverá ser atualizado antes do voo, ou recomenda-se realizar essa atualização quinzenalmente, acessando a página web do fabricante da aeronave.
2.3.5.9 Durante o a execução do plano de voo, se a aeronave apresentar algum problema, retornará automaticamente ao ponto inicial de trabalho.
2.3.5.10 Caso o operador da RPA resolva abortar o plano de voo antes do término programado, deverá clicar no ícone Home (FIGURA 42) localizado no canto inferior direito do aplicativo RPA DEPLOY no Smartphone/Tablet, finalizando assim o voo da RPA e fazendo com que a aeronave retorne ao ponto de partida.

2.3.5.11 Caso a RPA complete o plano de voo sem nenhum problema, retornará ao local de partida (home point). Quando a aeronave estiver descendo emitirá um alerta sonoro e, ao concluir a aterrissagem, desligará os motores das hélices automaticamente.
2.3.5.12 Após a aterrissagem bem sucedida, o operador deverá recolher a aeronave, descarregar os dados coletados durante a execução do voo que são gravados no cartão de memória (Micro SD) inserido na RPA. Havendo necessidade, o operador da aeronave poderá gravar os dados coletados na memória interna do dispositivo móvel empregado (Smartphone/Tablet).
2.4 PROCESSAMENTO DAS IMAGENS OBTIDAS
2.4.1 PROCESSAMENTO DAS IMAGENS COM PRECISÃO DE NAVEGAÇÃO
2.4.1.1 Após a conclusão dos levantamentos em campo, procedem-se aos trabalhos de gabinete pelo processamento das imagens obtidas, sendo esta a parte mais técnica do georreferenciamento.
2.4.1.2 Para processar as imagens e os dados armazenados durante o voo, será utilizado o software Agisoft PhotoScan, que é de origem russa e é comercializado pela empresa Agisoft (podendo ser substituído por aplicativos similares, a exemplo do Pix4D).
2.4.1.2.1 Adicionar fotos
a) O operador ao executar o programa Agisoft PhotoScan, deverá acessar o menu Fluxo de Trabalho, em seguida selecionar a opção Adicionar Fotos. Será aberta uma nova janela onde serão anexadas as fotos capturadas durante o voo. O usuário então deverá selecionar as fotos gravadas no cartão de memória.
b) Após a seleção das fotos capturadas no plano de voo, o usuário deverá dar o comando no Agisoft PhotoScan para carregar as imagens.
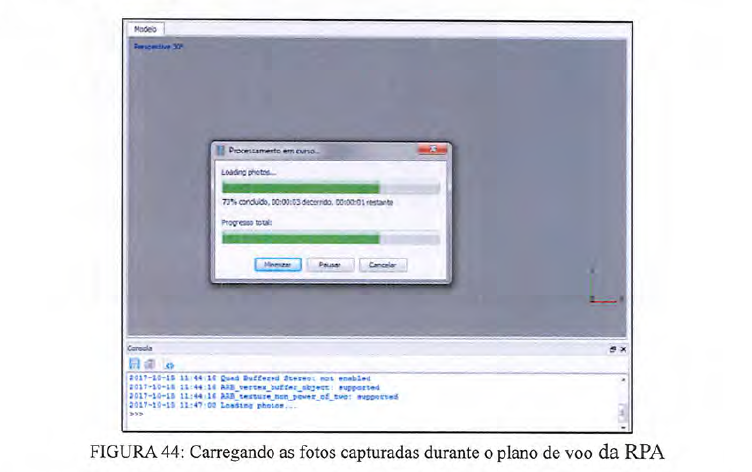
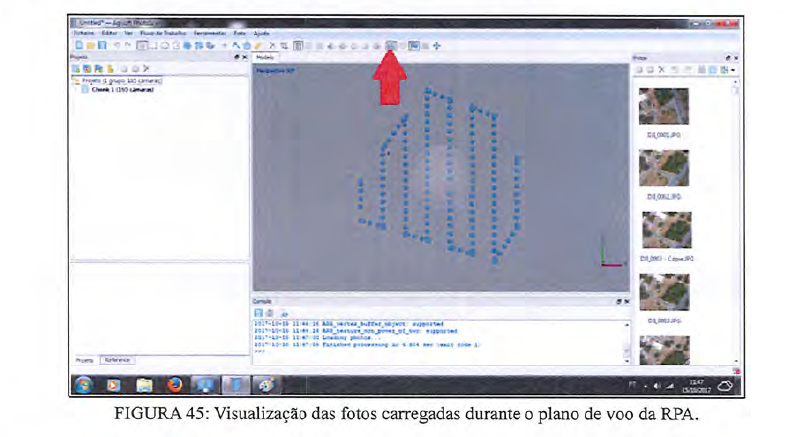
c) Quando o software Agisoft PhotoScan finalizar o trabalho de carregamento das fotos capturadas durante a execução do voo, o usuário deverá clicar em Show Cameras (FIGURA 45) para que seja apresentado o traçado do voo executado e o alinhamento das imagens capturadas pela câmera da aeronave, apresentando assim o centro de projeção/perspectiva das imagens.
2.4.1.2.2 Alinhar fotos
a) Após finalizar o carregamento das fotos, o usuário deverá alinhá-las, selecionando o botão fluxo de trabalho, em seguida deverá selecionar o botão alinhar fotos (Figura 46), onde será aberta uma nova caixa de diálogo onde deverá escolher a opção elevada para o item precisão devendo ser marcado reference para o item pré-seleção de pares, podendo haver adequação conforme a necessidade do projeto a ser executado.
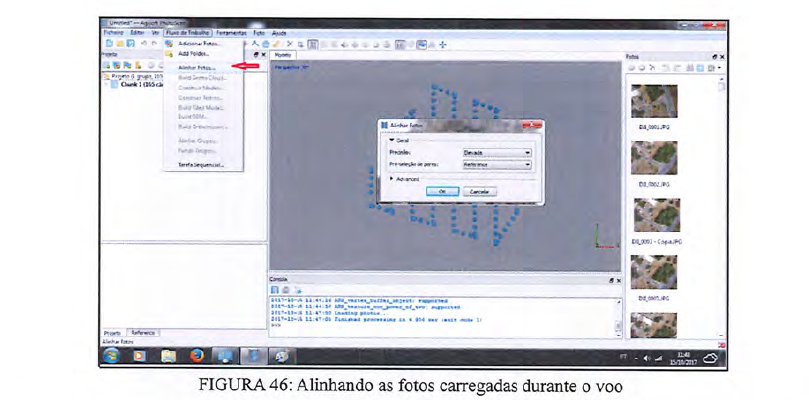
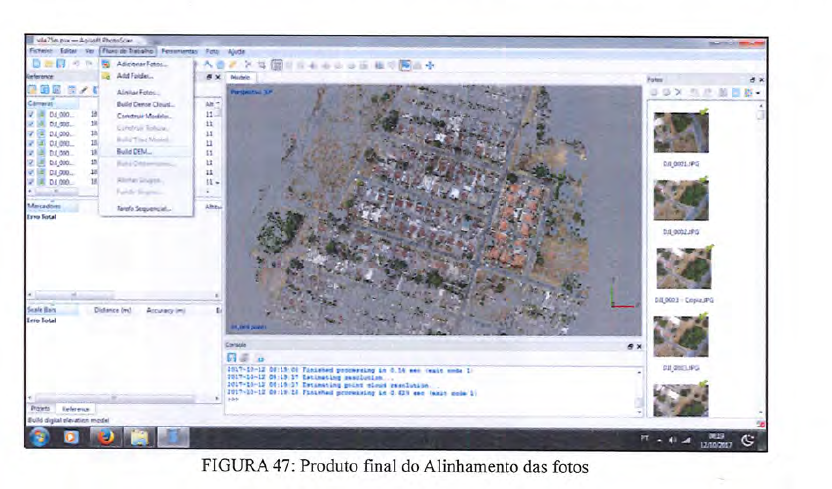
b) O usuário deverá clicar em OK para começar a alinhar as fotos, sendo que o software fará este processo automaticamente. O tempo de alinhamento das fotos depende diretamente da configuração do computador utilizado. O produto final do alinhamento das fotos coletadas está apresentado na FIGURA 47.
2.4.1.2.3 Geração do modelo digital de elevação (MDE ou DEM)
a) Com as fotos já alinhadas, será feito o modelo digital de elevação (MDE ou DEM em inglês), em que serão definidas as cotas das benfeitorias, feições fisiográficas e vegetação.
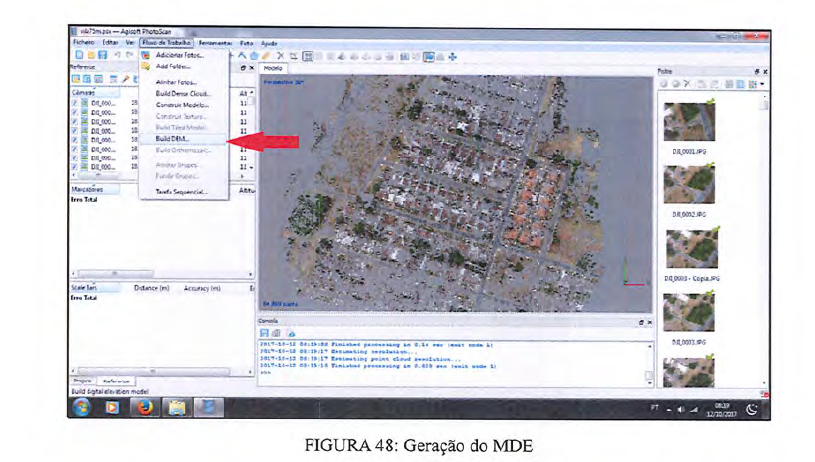
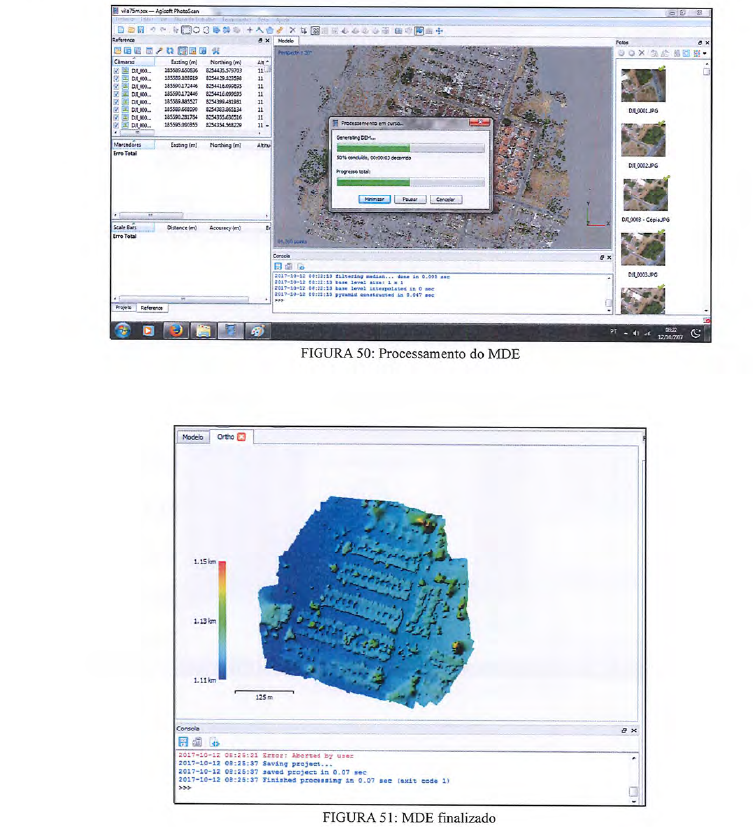
b) Para a confecção do MDE o operador deverá acessar Agisoft Photoscan, clicar no item fluxo de trabalho, em seguida selecionar o botão Buid DEM, o programa abrirá uma caixa de diálogo para que o usuário salve o projeto, onde deverá nomear o trabalho, indicar o sistema de coordenadas utilizado, escolher o diretório onde ficará armazenado e clicar em OK para salvar.
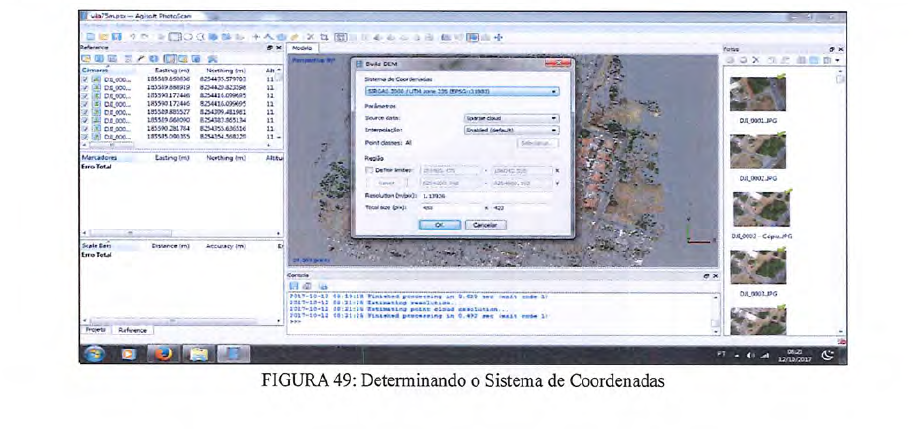
c) O programa irá processar os dados, fará um reajuste das coordenadas para o sistema escolhido pelo usuário e o resultado é o MDE finalizado.
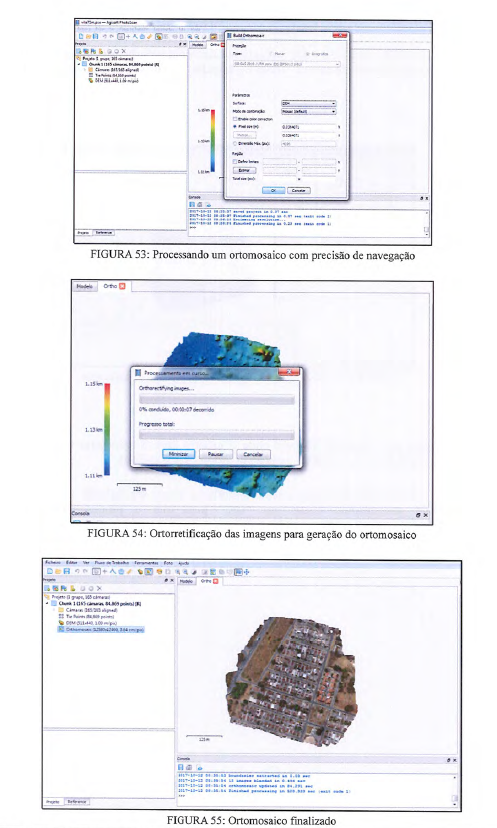
2.4.1.2.4 Geração do ortomosaico com precisão de navegação
a) Após finalizar o MDE, será elaborado um ortomosaico com precisão de navegação (FIGURA 52). Neste contexto o usuário deverá clicar em fluxo de trabalho e em seguida selecionar o botão Build Orthomosaic.
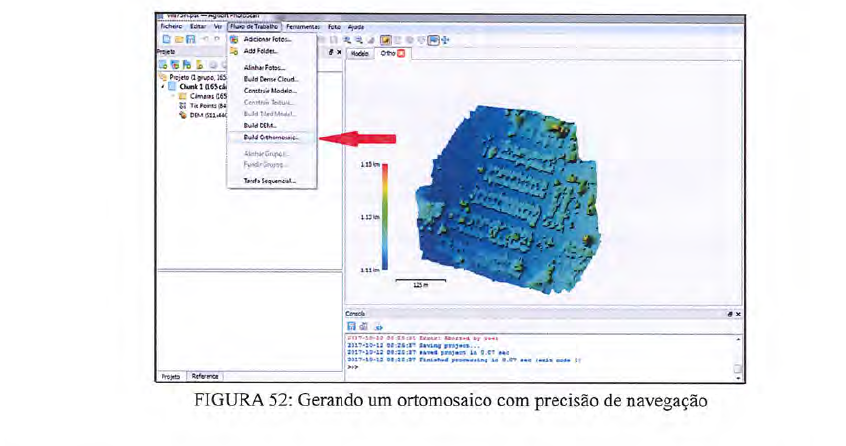
b) Será apresentada uma caixa de diálogo, onde o usuário deverá configurar o tipo de coordenada (plana ou geográfica) e definir a base para a geração do ortomosaico (MDE).
Após selecionar o MDE como base para o seu ortomosaico, deverá ser definido o sistema de referência (Ex.: SIRGAS2000) necessitando clicar em OK para que o processamento seja iniciado (FIGURAS 53 e 54).
2.4.2 PROCESSAMENTO DAS IMAGENS COM PRECISÃO TOPOGRÁFICA
2.4.2.1 Em aplicações que necessitem de precisão topográfica (submétrica), o processamento das imagens geradas pela RPA necessita do emprego de pontos de controle adquiridos por meio de equipamentos topográficos.
2.4.2.2 O levantamento de pontos em campo com o uso de receptores GNSS e/ou Estação Total pode ser anterior ou posterior ao voo e são uma etapa de fundamental importância para o adequado georreferenciamento das imagens geradas pela RPA. Nesta etapa o profissional competente fará a coleta de 5 (cinco) pontos no terreno (no mínimo), utilizando os equipamentos citados em áreas pré-determinadas e de fácil identificação na ortofotocarta com vistas a sobrepor os levantamentos topográficos e aerofotogramétricos, buscando, assim, uma coincidência dos pontos do aerolevantamento com os locados em campo para o aludido ajustamento de informações. 2.4.2.3 Para trabalhar as imagens e os dados armazenados durante o voo, será utilizado novamente o software de processamento de imagem Agisoft PhotoScan. O usuário deverá escolher o nível precisão que atenda o seu georreferenciamento no momento de realizar o processamento das imagens, isto é, deverá escolher se trabalhará com precisão topográfica (centimétrica) ou com precisão de navegação (métrica).
2.4.2.3.1 Carregar os pontos coletados em campo
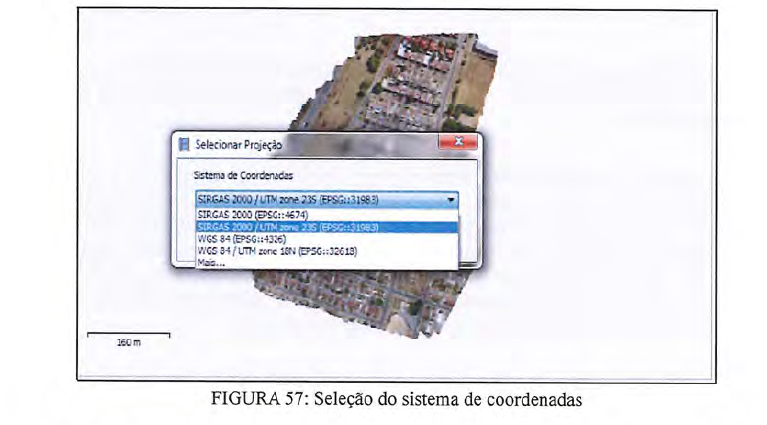
a) Para carregar (fazer o upload) os pontos coletados em campo com o emprego de material topográfico, o usuário deverá acessar o software Agisoft PhotoScan, e clicar no botão Converter (FIGURA 56), uma nova janela será aberta (FIGURA 57) na qual o executor deverá selecionar o sistema de coordenadas para o ajuste das imagens coletadas pela RPA. É importante ressaltar que tanto a RPA quanto os equipamentos de topografia empregados devem ser configurados com o mesmo sistema de coordenadas, o que permitirá a correta sobreposição dos pontos capturados em voo e em campo.

b) Após fazer a seleção do sistema de coordenadas, o executor deverá importar os dados do levantamento de campo realizado com material topográfico, selecionando o botão importar (FIGURA 58). Será aberta uma nova janela para que o usuário selecione o arquivo gravado no computador na extensão *.csv (FIGURA 59) e em seguida deverá clicar no botão abrir.

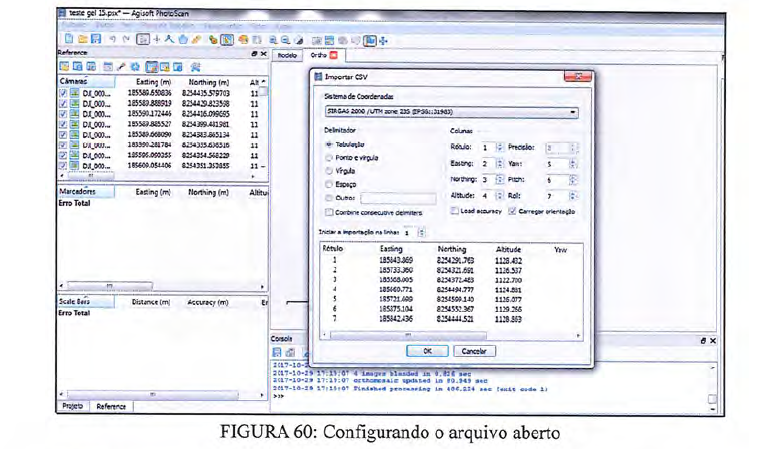
c) Quando o usuário clicar para abrir o arquivo, uma nova janela será aberta (FIGURA 60), onde deverá realizar a configuração do arquivo com extensão *.csv, selecionado anteriormente.
d) Após a conclusão da configuração do arquivo com extensão *.csv, o software retornará à página principal e os pontos coletados com material topográfico aparecerão sobrepostos no ortomosaico.

2.4.2.3.2 Georreferenciando com os pontos de controle
a) Uma vez carregadas as coordenadas dos pontos de controle, é necessário georreferenciar as fotos capturadas pela RPA com as coordenadas obtidas durante o levantamento de campo realizado com material topográfico, para tanto, o usuário deverá selecionar o botão Show Seamlines (Figura FIGURA 62).
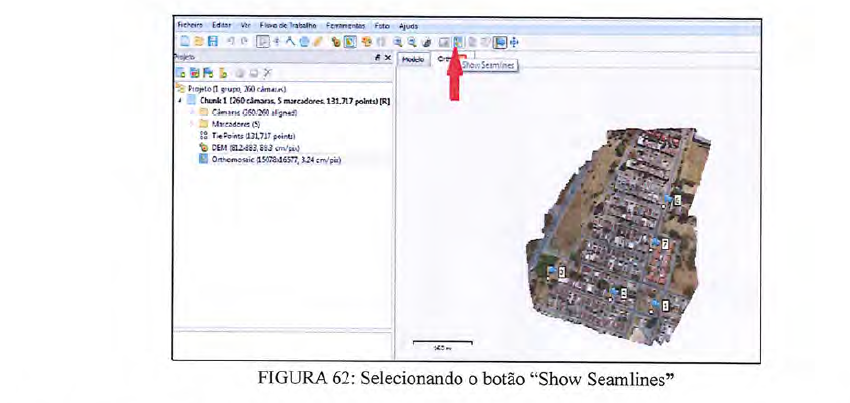
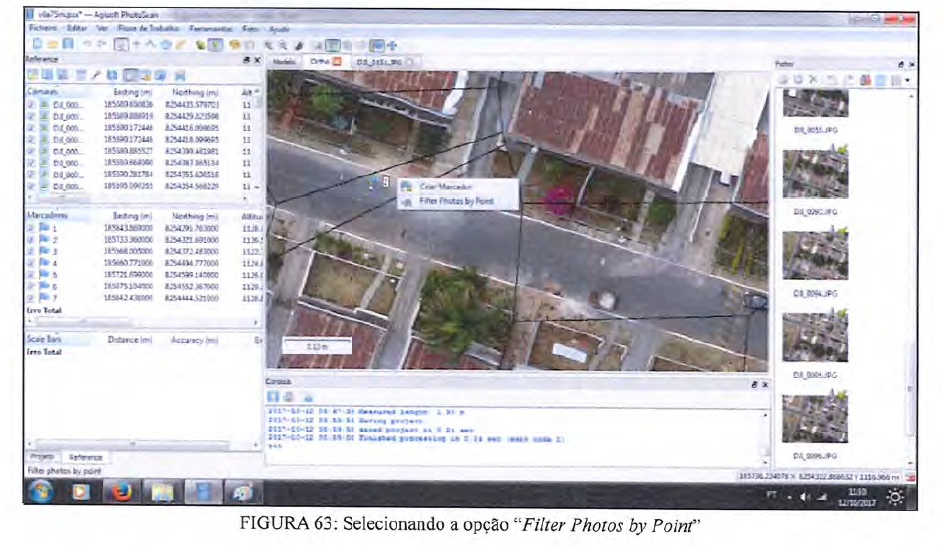
b) Após clicar no botão Show Seamlines, o software irá apresentar o ortomosaico subdividido com as imagens superpostas (um ponto pode estar em cima de várias fotos que formaram um recobrimento durante a montagem do ortomosaico). Clicando com o botão direito do mouse em cima do polígono, no qual estão os pontos de controle coletados em campo com o equipamento topográfico, aparecerá a opção Filter Photos by Point (que servirá para expor quais as fotos que compõe o polígono selecionado). O usuário deverá selecionar a opção Filter Photos by Point., e o software apresentará, em uma janela à direita, todas as fotos que compõem aquele polígono (Figura FIGURA 63).
c) O usuário deverá clicar duas vezes com o botão esquerdo do mouse em cada foto localizada no canto direito da tela, a imagem então aparecerá no centro da tela. O usuário deverá localizar o local correto do ponto controle na imagem, depois deverá clicar com o botão direito, selecionando a opção Place Marker. Selecionará, então, o número do ponto do ortomosaico (levantado durante a execução do plano de voo) correspondente ao ponto levantado em campo (com emprego de material topográfico). Neste momento, o software unirá os dois pontos, georreferenciado-os e aderindo precisão ao ortomosaico. Esse processo deverá ser repetido para cada foto do polígono que contenha ponto de controle.

2.4.2.3.3 Alinhando as imagens com os pontos de controle
a) Após a conclusão do item B, as fotos precisam ser alinhadas (organizadas). Neste procedimento o Agisoft PhotoScan encontrará a posição do centro perspectivo da câmera e fará a orientação para cada foto em relação aos pontos topográficos levantados em campo, construindo um modelo de nuvem de pontos esparsos, baseado nos pontos de controle.
b) O usuário deverá alinhar as fotos selecionando o botão fluxo de trabalho ( FIGURA 64) no software Agisoft PhotoScan e em seguida selecionar o botão alinhar fotos. Será aberta uma nova caixa de diálogo onde deverá ser escolhida a opção elevada para o item precisão e marcado reference para o item pré-seleção de pares, podendo haver adequação conforme a necessidade do projeto a ser executado. O usuário deverá clicar em OK para começar a alinhar as fotos.

2.4.2.3.4 Construindo uma nuvem de pontos densos (building dense point cloud)
a) Após o alinhamento das fotos o software permite confeccionar e visualizar um modelo de nuvem de pontos densos (sobreposição de imagens), gerando uma coordenada para cada pixel da imagem do ortomosaico. O programa irá calcular as informações de profundidade para cada imagem a ser combinada em uma única densidade de nuvem de pontos. Uma nuvem pontual densa pode ser editada no ambiente do software ou pode ser exportada para uma ferramenta externa (outro software, como o QGIS) para análise posterior, possibilitando gerar posteriormente um Modelo Digital do terreno (MDT), por exemplo.

b) O usuário deverá construir uma nuvem de pontos densos selecionando o botão "Fluxo de Trabalho" ( FIGURA 66), em seguida deverá selecionar o botão "Building Dense Cloud", quando será aberta uma nova caixa de diálogo ( FIGURA 67), devendo escolher a opção "Medium" para o item de Quality e para o item Depth filtering deverá selecionar a opção Agressive. Após isso, o usuário deverá clicar em "OK" para começar a construção da nuvem de pontos.
2.4.2.3.5 Confecção de malha
a) Para a construção de um modelo de malha triangular (que influenciará na montagem das curvas de nível no ortomosaico), o usuário precisa saber se as construções da área georreferenciada serão levadas em consideração ou não para o levantamento das curvas de nível, lembrando que o MDE considera todas as construções do terreno e o MDT abrange apenas o solo. Sendo assim, caso queira trabalhar com as superfícies das construções, deverá confeccionar um MDE, e caso queira trabalhar somente com as superfícies do terreno, deverá produzir um MDT.
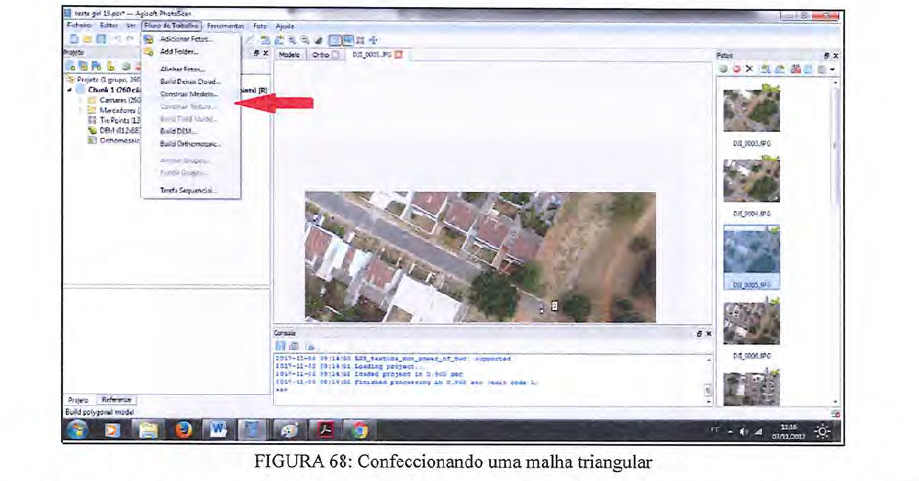
b) Para iniciar a elaboração de uma malha triangular, o usuário deverá selecionar o item Fluxo de Trabalho e escolher o comando Construir Modelo (FIGURA 68), quando será aberta uma nova caixa de diálogo para selecionar entre dois tipos de superfícies. O primeiro tipo de superfície a ser trabalhada é o arbitrário, que pode ser usado para modelagem de qualquer tipo de objeto (casas, edifícios, galpões etc.). A seleção da opção arbitrário deverá ocorrer quando o objetivo for trabalhar objetos fechados e isolados (em casos de reconstituição em 3ª dimensão de monumentos históricos como estátuas, edifícios etc.). Neste tipo de superfície não é indicado o tipo de objeto que será modelado. O primeiro tipo de superfície a ser trabalhada é o arbitrário, que pode ser usado para modelagem de qualquer tipo de objeto (casas, edifícios, galpões etc.). A seleção da opção arbitrário deverá ocorrer quando o objetivo for trabalhar objetos fechados e isolados (em casos de reconstituição em 3ª dimensão de monumentos históricos como estátuas, edifícios etc.). Neste tipo de superfície não é indicado o tipo de objeto que será modelado.
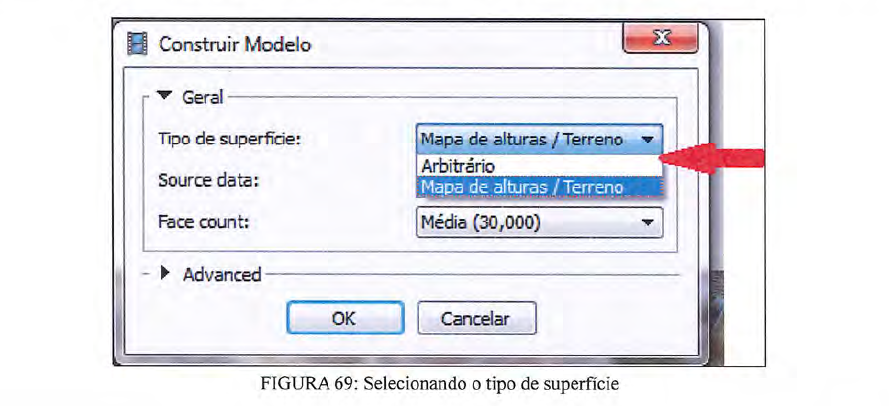
d) O segundo tipo de superfície a ser trabalhada é o Mapa de alturas/Terreno, onde a seleção desta opção trabalhará a modelagem de superfícies planas (como terrenos) e não levará em consideração as construções da área georreferenciada. Ao selecionar a opção Mapa de alturas/Terreno, fará com que o software Agisoft PhotoScan realize um processamento das fotografias aéreas capturadas, requerendo menor quantidade de memória RAM do computador utilizado e permitindo assim que se processe um conjunto de dados maiores.
e) Para o projeto a ser exemplificado neste Caderno de Instrução, foi escolhida a opção Mapa de alturas/Terreno para o tipo de superfície, pois será criado um MDT (Figura FIGURA 69).
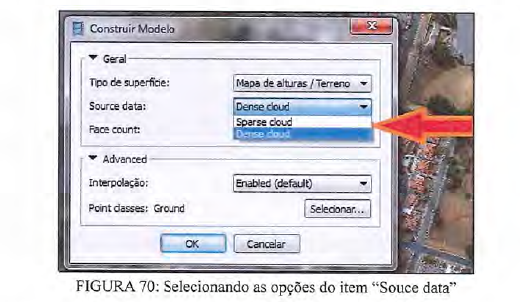
f) A segunda seleção que o topógrafo tem que executar é no item Source data (origem dos dados), onde o deverá ser indicada a proveniência da malha de pontos a serem empregadas no georreferenciamento.
g) O software apresentará duas opções para o item Source data que especificará a origem dos procedimentos para a geração da malha. A primeira alternativa é a Sparse cloud (nuvem dispersa), que poderá ser usada para a geração rápida de modelos 3D baseada unicamente na nuvem do ponto esparso (com um trabalho acabado com menor precisão e menor qualidade). A segunda possibilidade é trabalhar com a seleção da Dense cloud (nuvem densa), onde o software realizará a configuração de uma nuvem densa que resultará em um tempo de processamento mais longo, gerando um produto final de alta qualidade e de grande precisão (baseado na nuvem de pontos densa previamente construída no item 2.4.1). Para o exemplo a ser seguido neste Caderno de Instrução o usuário deverá selecionar o item Dense cloud.
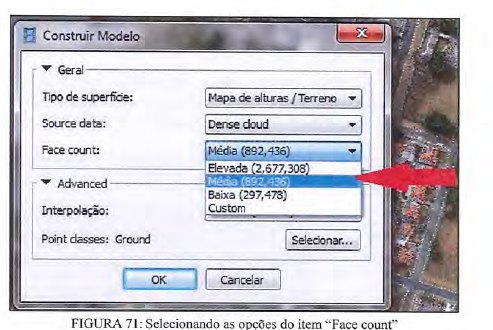
h) A terceira seleção a ser trabalhada na janela de construção de modelo é o item Face count (Contagem de polígonos a serem construídos para a construção da malha triangular para executar uma interpolação ao final). Esse item mostrará a quantidade de polígonos (em forma de triângulos) que serão gerados, onde uma maior quantidade de triângulos confeccionados nesta etapa aumentará a precisão do trabalho ao realizar uma interpolação. O usuário deverá então selecionar uma das quatro alternativas Elevada, Média, Baixa e Custom, onde o topógrafo deverá ponderar a sua escolha, pois uma elevada quantidade de polígonos gerados pode gerar problemas de visualização (dependendo da placa de vídeo do computador empregado). O usuário poderá ainda ter problemas com malhas irregulares ao selecionar uma quantidade baixa de polígonos. Para exemplificar o projeto deste Caderno de Instrução, será utilizada a quantidade média de polígonos, sendo esta a mais recomendada para todos os georreferenciamentos.
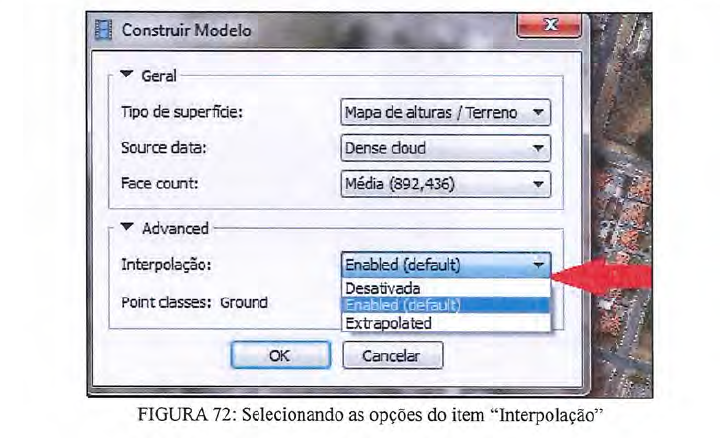
i) O usuário passará para a seleção da opção Advanced, onde fará a configuração de alguns parâmetros avançados por meio do item Interpolação e poderá escolher três alternativas Enabled (default), Desativada e Extrapolated. Nessa etapa fará a interpolação de todos os polígonos que foram selecionados no item Face count. O usuário poderá escolher o item Enabled (default) (habilitado), que mostrará resultados mais precisos, onde poderão aparecer falhas nos perímetros do ortomosaico (ao processar a interpolação dos polígonos podem ocorrer áreas que não foram trabalhadas pelo software Agisoft PhotoScan em suas extremidades por serem quase do mesmo tamanho que a área final a ser georreferenciada), devendo as áreas cegas serem interpoladas no pós-processamento. Quando selecionar o item Extrapolated (extrapolado), o software gerará uma interpolação maior que a área final a ser georreferenciada (sem áreas cegas), realizada com uma geometria extrapolada e com uma menor precisão do que o item Enabled. Caso o operador opte por selecionar o item Desativada não haverá a produção de malha triangular (curvas de nível) no ortomosaico. No projeto deste Caderno de Instrução o topógrafo selecionará o item Enabled (default) para obter uma maior precisão ( FIGURA 72).
2.4.2.3.6 Confecção de textura
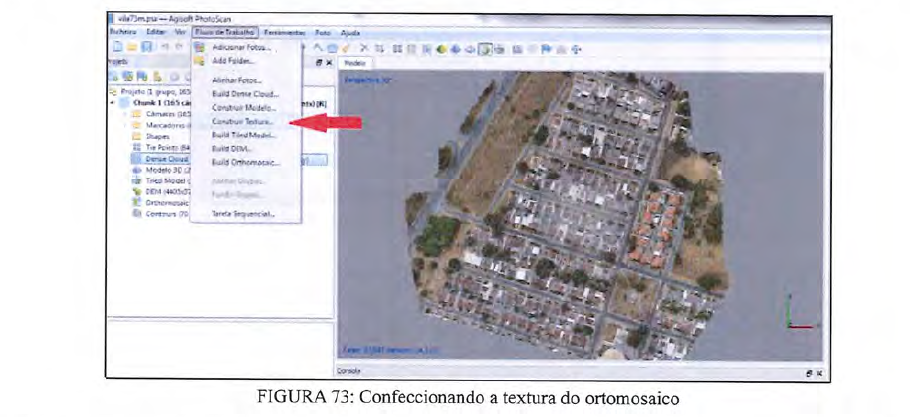
a) A determinação do modo de construção de textura proporcionará a dimensão e as características de como o ortomosaico será visualizado ao final do ajuste. Para gerar textura de modelo 3D, o usuário deverá clicar em Fluxo de Trabalho e selecionar Construir Textura (Figura FIGURA 73).
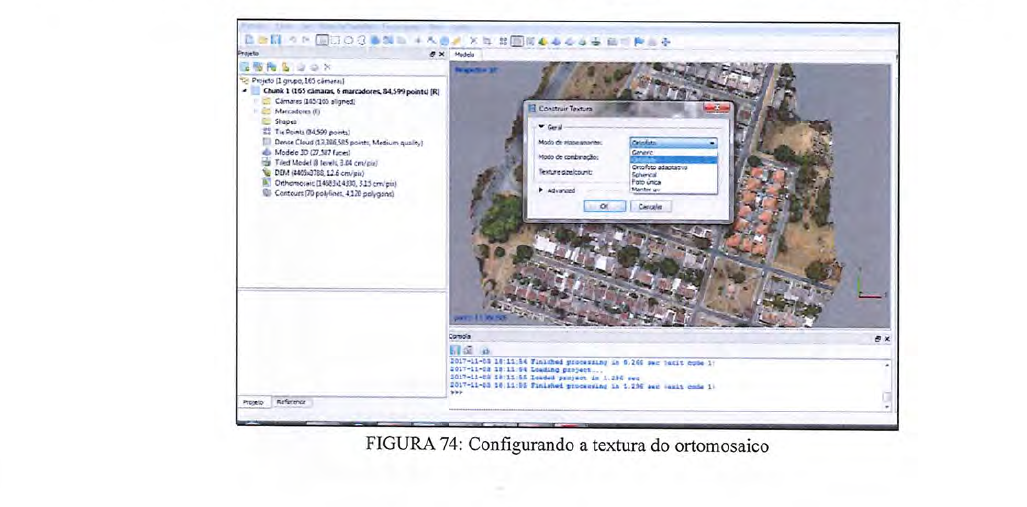
b) Ao clicar em Construir Textura será aberta uma nova caixa de diálogo para que seja feito a configuração da textura do orotmosaico. A opção Modo de mapeamento apresentará seis itens, onde se deve selecionar a alternativa Ortofoto para que, ao final, seja construído um MDT ( FIGURA 74).
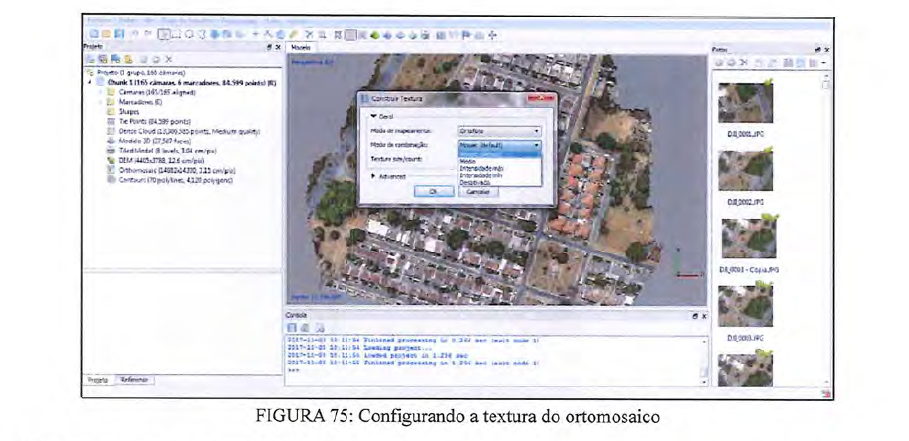
c) A próxima configuração de textura a ser executada será na opção Modo de combinação, onde deverá ser selecionado o item Mosaic (default) (Figura 75), sendo a alternativa mais adequada para a criação de um MDT. Após realizar as configurações anteriores, o usuário deverá clicar em OK para o início do processamento da texturização do ortomosaico.
2.4.2.3.7 Geração do MDE ou MDT
a) Concluído o processo de texturização do ortomosaico, deverá ser gerado um MDT (Modelo Digital de Terreno) ou um MDE (Modelo Digital de Elevação). Nesta etapa o operador irá definir todas as cotas dos imóveis, das benfeitorias, das árvores e dos obstáculos materializados na área que foi georreferenciada.
b) Para isso, o próximo passo será clicar na opção Fluxo de Trabalho, em seguida irá selecionar a alternativa Build DEM, onde o programa Agisoft PhotoScan exigirá que o usuário nomeie o arquivo e posteriormente salve o projeto (Figura FIGURA 76). Será aberta uma nova janela que permitirá nomear e escolher o diretório de armazenamento (onde o arquivo será salvo).

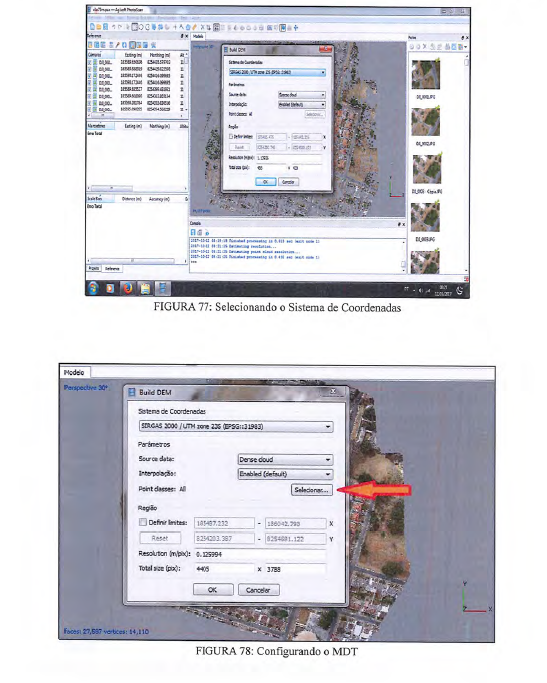
c) Após o salvamento, automaticamente abrirá uma nova caixa de diálogo que apresentará algumas opções, como o tipo de coordenada ( FIGURA 77). O projeto exemplificado neste Caderno de Instrução utilizará o Sirgas 2000 ou WGS 84, que será a base de coordenadas para a geração do ortomosaico (MDT), onde o usuário deverá escolher a opção Point Classes: All clicando em Selecionar ( FIGURA 78). A seleção realizada na opção Point classes: All determinará se vai ser gerado um MDT ou MDE.
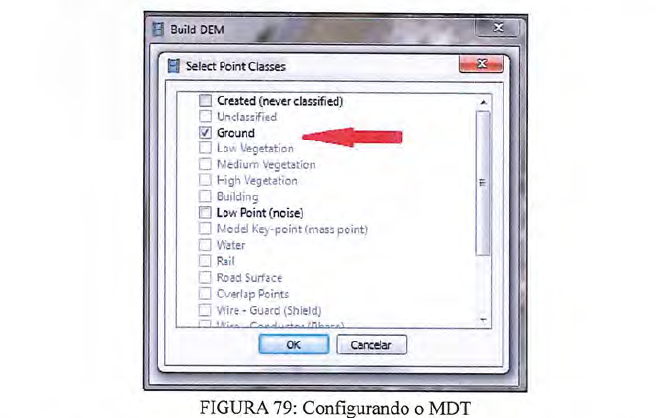
d) Após a geração do modelo digital, automaticamente será aberta uma nova janela denominada Select Point Classes, onde o usuário deverá selecionar o item Ground para que o software gere o MDT, devendo deixar desmarcadas todas as alternativas. Em seguida deverá clicar em OK para que o processamento do ortomosaico seja iniciado ( FIGURA 79).
e) Caso o interesse seja gerar um MDE terá que selecionar todos os itens da opção Select Point Classes e em seguida deverá clicar em OK (não será demonstrada esta fase no Caderno de Instrução, tendo em vista que o objetivo é confeccionar o MDT).
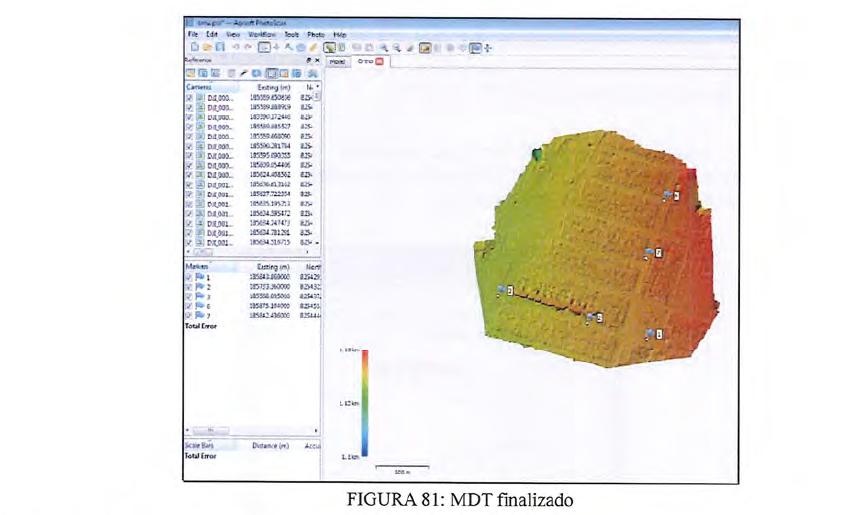
f) O programa Agisoft PhotoScan irá iniciar o processamento do MDT ( FIGURA 80), reajustando as coordenadas para o sistema escolhido pelo usuário ( FIGURA 81).

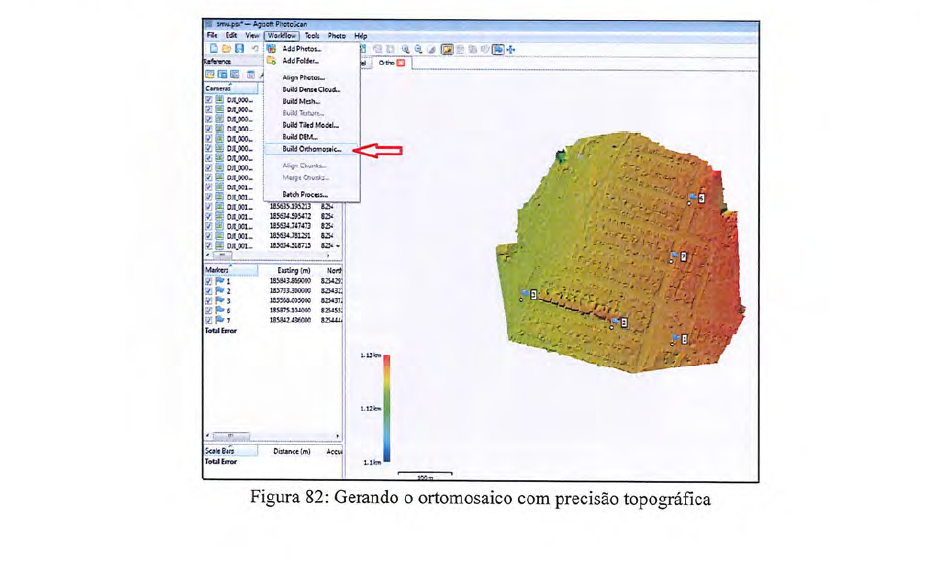
2.4.2.3.8 Gerando ortomosaico com precisão topográfica
a) Ao finalizar a criação do MDT, será gerado o ortomosaico com precisão topográfica. O usuário deverá clicar em Workflow e em seguida irá selecionar o botão Build Orthomosaic ( FIGURA 82) onde será aberta uma nova janela.
b) A nova caixa de diálogo apresentará as opções de projeção do ortomosaico. O usuário deverá selecionar o tipo de projeção a ser utilizado (Planar ou Geographic), este Caderno de Instrução apresentará a escolha do item Planar ( FIGURA 82). Em seguida deverá clicar em OK, iniciando, assim, o processamento da ortorretificação ( FIGURA 83) das imagens com precisão topográfica.
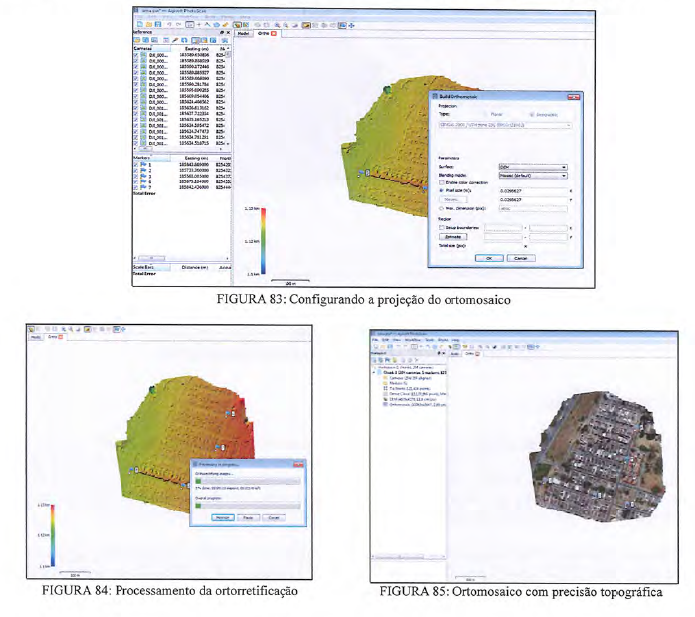
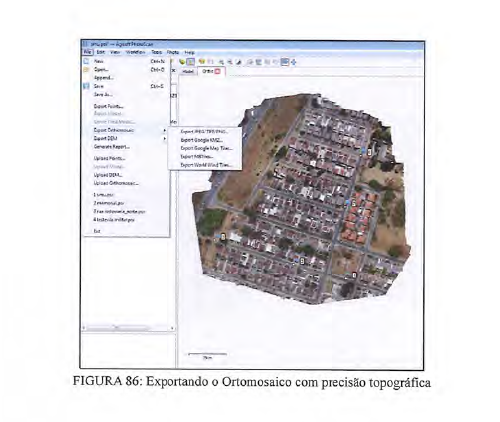
c) Após o processamento da ortorretificação, o software Agisoft PhotoScan apresentará o ortomosaico com precisão topográfica como produto final. Com isso está finalizado o trabalho de georreferenciamento, o próximo passo será exportar o arquivo gerado pelo programa, acessando a opção File. Em seguida deverá selecionar Export orthomosaic ( FIGURA 86) e escolher qual extensão utilizará para enviar o arquivo.
CAPÍTULO III
AVALIAÇÃO DA QUALIDADE DO PROCESSAMENTO
3.1 INTRODUÇÃO
No item 2.4 foram apresentados os procedimentos operacionais para a construção de um ortomosaico com precisão topográfica e um MDT a partir da execução de um plano de voo de RPA para georreferenciar uma área. Neste contexto, o usuário deverá verificar a aplicabilidade do trabalho final, constatando se o emprego da tecnologia em apoio aos levantamentos topográficos acarretam ganho considerável de custos e tempo, assegurando a precisão aceitável para o georreferenciamento.
Para exemplificar o referido procedimento, serão apresentados os resultados de 2 (dois) levantamentos executados pela DPIMA, nas áreas dea Vila de Oficiais de Formosa (VF) e Platô Forte Santa Bárbara (PFSB), servindo de referência para a confecção deste documento.
3.2 AVALIAÇÃO DO PADRÃO DE EXATIDÃO CARTOGRÁFICA (PEC)
3.2.1 O Padrão de Exatidão Cartográfica (PEC) consiste em uma tabela de parâmetros estipulados para se verificar a qualidade dos produtos cartográficos gerados no Brasil.
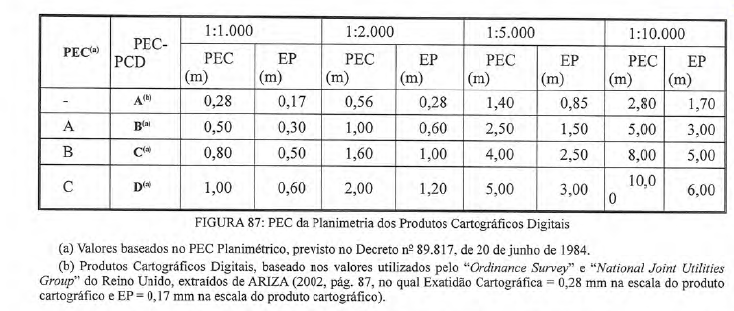
3.2.2 Primeiramente, deverá ser verificado se o produto gerado atende às normas da Comissão Nacional de Cartografia (CONCAR) e da legislação brasileira (Decreto Nr 89.817, de 20 de junho de 1984). Esta verificação, nos casos exemplificados, foi executada obtendo alguns pontos em campo com GNSS para verificar a precisão dos dados do ortomosaico. Ao final será realizada uma comparação com os dados da FIGURA 871.
3.2.3 Com base nesses parâmetros, foi realizado um levantamento dos pontos de verificação (pontos bem definidos no ortomosaico, e medidos em campo com emprego de GNSS). De posse dos resultados obtidos em campo, foi elaborada uma planilha ( FIGURAS 88 e 89) com todos os dados necessários para fazer a avaliação do PEC, relativo à Planimetria.
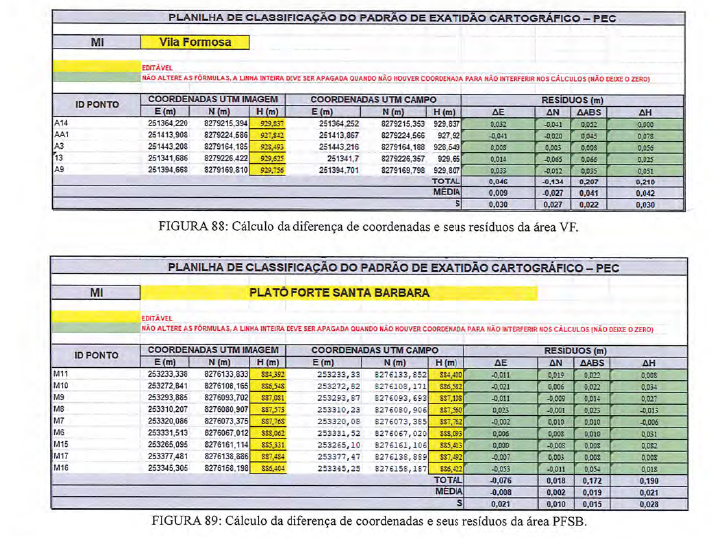
3.2.4 As avaliações foram efetuadas de acordo com as Figuras 88 e 89, considerando o cálculo de diferença entre as coordenadas dos pontos e os resíduos correspondentes. Para viabilizar o cálculo comparativo, foram inseridas as coordenadas de imagem dos pontos de verificação na planilha, extraídas do ortomosaico ajustado aos pontos de controle.
3.2.5 O cálculo foi então realizado por meio da subtração entre as coordenadas de campo e de imagem, em cada ponto georreferenciado. Neste contexto foi observado, no item RESÍDUOS, a diferença entre as coordenadas AE e AN, avaliando o erro total em cada ponto. Na última linha de cada planilha ( FIGURA 82 e FIGURA 89) aparecem os dados estatísticos (somatória, média e desvio padrão).
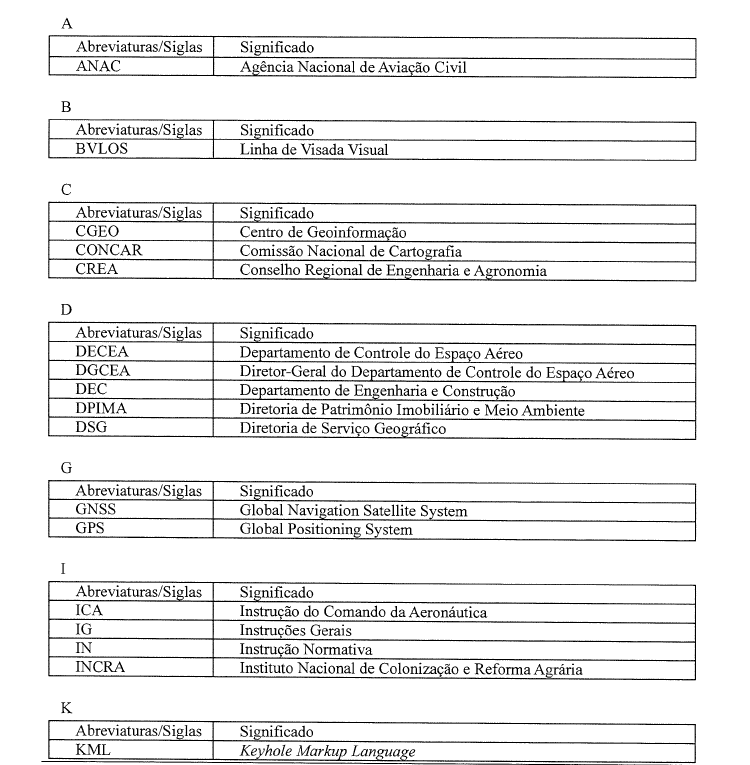
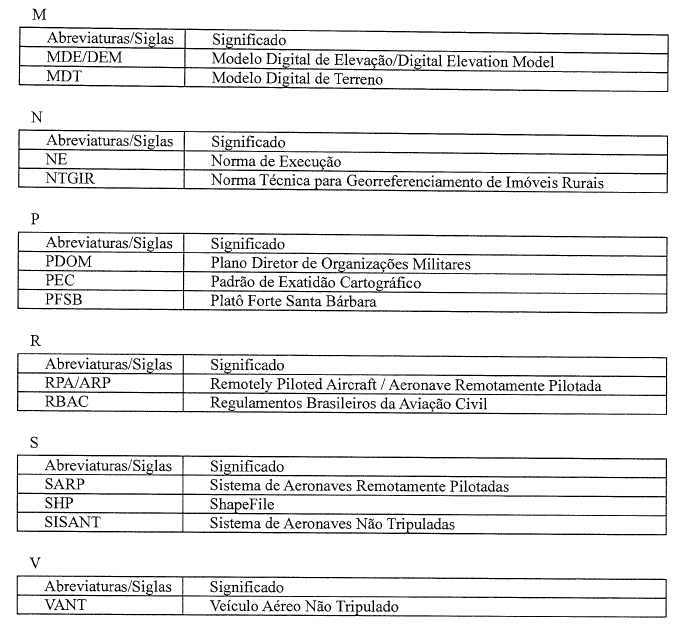
3.2.6 Com estas informações foi possível comparar os dados entre as tabelas do PEC empregando o desvio padrão e por meio da porcentagem da amostra, que auxiliam na avaliação do serviço.
3.2.7 Considerando que os trabalhos exemplificados foram dimensionados para a escala 1:500, chegou-se aos seguintes resultados:
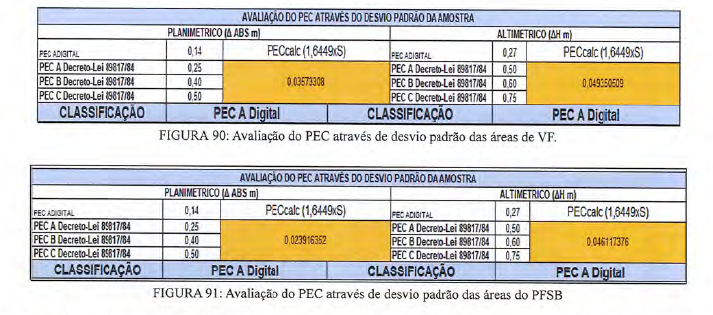
3.2.8 A partir de uma avaliação utilizando o desvio padrão como parâmetro, conclui-se de que os produtos gerados podem ser classificados como PEC A Digital, pois os erros médios calculados foram de aproximadamente 0,0357 m (VF) e 0,0239 m (PFSB) na planimetria e 0,0493 m (VF) e 0,0461 m (PFSB) na altimetria. Portanto, menores que o estabelecido na classificação PEC A Digital, onde o valor máximo admitido é de 0,14 m em todas as dimensões.

3.2.9 Ao ser realizada a avaliação empregando o número de amostras, chega-se àa conclusão de que o produto gerado pode ser classificado como PEC A Digital, pois não foi achado o erro calculado, atingindo o nível de 100%, portanto dentro das especificações, sendo que todos os erros foram menores que 0,14 metros.
3.2.10 Por segurança, foi utilizado o pior resultado obtido a partir das amostras. Assim, o produto do georreferenciamento com RPA (ortomosaico) pode ser classificado como sendo PEC A Digital, melhor do que os parâmetros estabelecidos na legislação brasileira.
3.3 CONSIDERAÇÕES ACERCA DA DIFERENÇA ENTRE AS COORDENADAS DE CAMPO E AS DE IMAGEM
3.3.1 Da análise dos dados apresentados na FIGURA 88 e na FIGURA 89, pode-se observar que todos os pontos tiveram discrepância inferior a 0,08 metros (conforme determina o Decreto Nr 9.310, de 15 MAR 18). Tal observação demonstra que, se bem executados o planejamento, a execução do plano de voo e a coleta dos pontos de controle e de verificação com emprego de GNSS, o erro apresentado é tolerável para aquisições de dados topográficos (adequado para confecção de plantas cadastrais e memoriais descritivos).
3.3.2 A amplitude dos erros encontrados, durante a avaliação, pode ser explicada pelo número de pontos de controle e sua distribuição no âmbito da área levantada. Além disso, a boa visualização dos alvos contribui para uma correta extração das coordenadas de imagem.
3.3.3 Para facilitar a identificação das marcações dos locais correspondentes aos pontos de controle, foram empregados moldes em folha de papel A3, subdivididos em 4 (quatro) partes, alternando pelo menos 2 (duas) cores diferentes. Assim, foi possível a obtenção do contraste necessário para o melhoramento da visualização do pixel do ponto de controle, na hora do ajuste dos pontos ao programa, reduzindo os erros a um padrão aceitável (menor 0,10 metros).
CAPÍTULO IV
CONSIDERAÇÕES FINAIS
4.1 CONCLUSÃO
4.1.1 O presente Caderno de Instrução teve, como principal objetivo, apresentar o uso da RPA para contribuir com o levantamento patrimonial de áreas jurisdicionadas ao Exército Brasileiro, diminuindo o tempo necessário para o georreferenciamento, e aponta vantagens em termos de custos no emprego de equipes de topografia. O emprego dessa tecnologia em projetos de engenharia reduz consideravelmente o tempo de trabalho de campo e, por sua vez, proporciona economia de recursos.
4.1.2 Pelos dados obtidos na avaliação do PEC, pode-se afirmar que o produto gerado atende às exigências de um trabalho preciso de topografia, podendo ser empregado para confrontar limites e contestar interesses privados em áreas patrimoniais, com a utilização de novas tecnologias apoiadas por métodos tradicionais existentes (GPS, locação com teodolitos, estações totais etc.).
4.1.3 O levantamento topográfico de áreas urbanas pode ser executado por meio desse processo aerofotogramétrico, pois atende às exigências legais.
4.1.4 Por fim, pode-se concluir que os produtos gerados podem ser empregados pela Engenharia Militar em apoio as atividades de gestão patrimonial (levantamento topográfico, patrulha patrimonial, etc.). A observância de todos os passos descritos neste Caderno de Instrução, viabiliza a obtenção de produtos de qualidade, com otimização do tempo de execução de trabalho de campo, minimizando os custos à Administração Militar.
GLOSSÁRIO
PARTE I ABREVIATURAS E SIGLAS
Continuação do GLOSSÁRIO
PARTE II - TERMOS E DEFINIÇÕES
Aerofotogrametria: é a ciência que permite executar medições precisas utilizando fotografias métricas. (IBGE).
Aeronave Remotamente Pilotada: (Remotely-Piloted Aircraft RPA) é a aeronave não tripulada pilotada a partir de uma estação de pilotagem remota com finalidade diversa de recreação. (RBAC-E nº 94/ANAC).
Altimetria: é o conjunto de processos que objetivam a determinação da altitude de um dado ponto da superfície terrestre. (adaptado de IBGE).
Coordenadas Plana: são as medidas métricas, projetadas do meio curvo (elipsóide) para o plano, com objetivo de localizar qualquer ponto da superfície terrestre.
Coordenadas Geográfica: são os valores numéricos através dos quais podemos definir a posição de um ponto na superfície da Terra, tendo como ponto de origem para as latitudes o Equador e o meridiano de Greenwich para a origem das longitudes. (IBGE).
Drone: é o termo em inglês que significa "zangão", que ficou mundialmente popular para designar todo e qualquer tipo de aeronave que não seja tripulada, mas comandada por seres humanos a distância. (adaptado de https://www.significados.com.br/RPA/).
Fotogrametria: é a ciência que trata da obtenção de medições fidedignas de imagens fotográficas a partir de fotografias ou imagens aéreas ou orbitais, utilizando-se instrumentos óticos-mecânicos sofisticados. (adaptado de IBGE)
Geodésia: é a ciência que se ocupa da determinação da forma, das dimensões e do campo de gravidade da Terra. (IBGE)
Georreferenciamento: é a definição da forma, dimensão e localização do imóvel, por meio da determinação de suas coordenadas. (adaptado de INCRA, 2000).
Gimbal: é o acessório utilizado em RPAs com o objetivo de estabilizar a imagem das câmeras acopladas a eles. (https://www.techtudo.com.br/)
Global Navigation Satellite System: é o sistema global de posicionamento por satélites artificiais que utiliza arquitetura de técnicas associadas às infraestruturas espacial e terrestre, somando-se diversos sistemas satelitais. (adaptado de IBGE)
Global Positioning System
: é o sistema americano de posicionamento global por satélites artificiais. (adaptado de IBGE)Imóvel: é o terreno com ou sem benfeitoria (IG 10-38)
Imóvel Urbano: é o imóvel situado dentro do perímetro urbano definido em lei.
Imóvel Rural: é a extensão contínua de terras com destinação (efetiva ou potencial) agrícola, extrativa vegetal, florestal ou agroindustrial, localizada em zona rural ou em perímetro urbano. (IN/INCRA nº 82, de 27 MAR 15)
Levantamento Aerofotogramétrico: método de levantamento fotográfico que utiliza como sensor uma câmera fotogramétrica instalada em aeronaves, para fotografar a área de interesse de forma sistemática compondo faixas de fotos aéreas com especificações que permitam a construção de modelos estereoscópicos. (IBGE)
Levantamento Topográfico: é o conjunto de métodos e processos que, através de medições de ângulos horizontais e verticais, de distâncias horizontais, verticais e inclinadas, com instrumental adequado à exatidão pretendida, primordialmente, implanta e materializa pontos de apoio no terreno, determinando suas coordenadas topográficas. A estes pontos se relacionam os pontos de detalhes visando à sua exata representação planimétrica numa escala predeterminada e à sua representação altimétrica por intermédio de curvas de nível, com equidistância também predeterminada e/ou pontos cotados. (NBR13133/ABNT)
Modelo Digital de Elevação modelo digital que representa as altitudes da superfície topográfica agregada aos elementos geográficos existentes sobre ela, como cobertura vegetal e edificações. (IBGE)
Modelo Digital do Terreno: é a representação matemática da distribuição espacial da característica de um fenômeno vinculada a uma superfície real. (INPE):
Ortofoto: é um produto da fotogrametria que consiste em um mapa digital de alta precisão do terreno com georreferenciamento através da união inteligente de diversas fotos com sobreposição predeterminada, representando o terreno em sua forma ortográfica verdadeira, eliminando todas as perspectivas, deslocamentos devido ao relevo e a inclinação da fotografia. (http://www.wraRPA.com.br)
Ortomosaico: é o mosaico de fotografias aéreas ou de imagens de satélites ortorretificadas e realçadas para homogeneizar sua aparência. (IBGE)
Ortorretificação: é um processo que visa corrigir uma imagem, de modo que cada pixel é colocado na posição geométrica teórica como se eles tivessem sido imageados na vertical ou mais próximo desta situação. (Laurent Martin, Engesat)
Planimetria: é o conjunto de processos para obtenção da projeção horizontal ou representação plana do terreno. (UFMG Ariclo Pulinho Pires de Almeida, José Carlos de Paula Freitas e Maria Márcia Magela Machado)
Shapefile: é um formato popular de arquivo contendo dados geoespaciais em forma de vetor, usado por Sistemas de Informações Geográficas.
Sistema de Aeronave Remotamente Pilotada: (Remotely-Piloted Aircraft System RPAS), o enlace de pilotagem e qualquer outro componente, como especificado no seu projeto. (adaptado de RBAC-E nº 94/ANAC).
Sistema Geodésico Brasileiro: Conjunto de pontos geodésicos descritores da superfície física da Terra, implantados e materializados na porção da superfície terrestre delimitada pelas fronteiras do país, com vistas às finalidades de sua utilização, que vão desde o atendimento a projetos internacionais de cunho científico, passando pelas amarrações e controles de trabalhos geodésicos e cartográficos, até o apoio aos levantamentos no horizonte topográfico, onde prevalecem os critérios de exatidão sobre as simplificações
REFERÊNCIAS
AGISOFT - Agisoft Photoscan User Manual: Standard Edition. Version 1.3. Saint-Petersburg: Agisoft LLC, 2017.
AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL - ANAC. RBAC E-94 - Requisitos Gerais Para Aeronaves Não Tripuladas de Uso Civil. Brasília, 2017.
BRASIL. Presidência da República. Lei Nr 6.015, de 31 de outubro de 1973. Dispõe sobre os Registros Públicos.
_______.Presidência da República. Decreto Nr 89.817, de 20 de junho de 1984. Estabelece as Instruções Reguladoras das Normas Técnicas da Cartografia Nacional. Diário Oficial da República Federativa do Brasil, Seção I, Brasília, 22 jun.1984.
BRASIL. Presidência da República. Lei Nr 10.267, de 28 de agosto de 2001. Dispõe sobre o Georreferenciamento de Imóveis Rurais.
_______.Presidência da República. Decreto Nr 4.449, de 30 de outubro de 2002. Regulamenta a Lei Nr 10.267, que dispõe sobre registros públicos e dá outras providências.
_______.Presidência da República. Decreto Nr 5.570, de 31 de outubro de 2005. Estabelece nova redação aos dispositivos do Decreto Nr 4.449.
_______.Presidência da República. Decreto Nr 9.310, de 15 de março de 2018. Institui as normas gerais e os procedimentos aplicáveis à Regularização Fundiária Urbana e estabelece os procedimentos para a avaliação e a alienação dos imóveis da União. Diário Oficial da República Federativa do Brasil, Seção I, Brasília, 16 mar. 2018.
COMISSÃO NACIONAL DE CARTOGRAFIA - CONCAR. ET-EDGV v2.1. Especificação Técnica para a Estruturação de Dados Geoespacias Vetoriais. Rio de Janeiro, 2008.
DEPARTAMENTO DE CONTROLE DO ESPAÇO AÉREO - DECEA. Portaria DCEA Nr 282 (ICA 100-40) - Aprova o manual de Sistemas de Aeronaves Remotamente Pilotadas e o Acesso ao Espaço Aéreo Brasileiro. Rio de Janeiro, 2017.
DÀ-JIÃNG INNOVATIONS - DJI. Phantom 4 User Manual. V1.6. Shenzhen Guangdong, 2017.
INSTITUTO NACIONAL DE COLONIZAÇÃO E REFORMA AGRÁRIA - INCRA. NE 105 - Regulamenta o procedimento de análise dos processos de certificações do INCRA. Brasília, 2012.
_______.IN 77 - Regulamenta o procedimento de certificação da poligonal objeto de memorial descritivo de imóveis rurais. Brasília, 2013.
_______. NTGIR 3ª Edição - Dispõe sobre as condições exigíveis para a execução dos serviços de georreferenciamento de imóveis rurais. Brasília, 2013.
_______. Portaria Nr 486 - Homologa a NTGIR 3ª Edição. Brasília, 2013.